
A light that activates in an empty room is more than an annoyance. It is a failure of purpose. In environments like a vehicle showroom, where cars are frequently repositioned, this failure becomes constant as lights flicker on and off, responding to the thermal signature of a recently run engine or the glint of a headlight. The system, intended to serve people, becomes enslaved to machinery. It feels cheap, chaotic, and unintelligent.
This problem isn’t solved by a more expensive sensor, but by understanding the physics of detection. True control comes from applying the first principles of sensor technology to distinguish human presence from the thermal and kinetic noise of the environment. By engineering the system’s logic, you can create lighting that remains loyal to people, not engines.
The Core Conflict: When Presence Isn’t Human
The fundamental challenge is that a standard Passive Infrared (PIR) sensor does not see people; it sees rapid changes in thermal energy. In a simple office, a human is the only object capable of producing such a change. But in a complex environment, many non-human sources create thermal events that mimic human presence and lead to false triggers.
A recently operated engine, HVAC unit, or piece of industrial equipment doesn’t just radiate heat uniformly. It creates a “heat plume,” a rising column of warm air that billows and moves. To a PIR sensor, this turbulent mass of thermal energy is indistinguishable from a large, warm body moving through its detection field. When a vehicle is moved into a showroom, its engine can emit these plumes long enough to trigger the lights repeatedly until its temperature equalizes with the room. This is a primary source of disloyal activation.
PIR sensors can also be deceived by secondary thermal events. A flash of sunlight reflecting off a polished hood can momentarily saturate a detection zone, causing a sudden infrared spike that results in a false trigger. Even the movement of an object at a different temperature than the background, such as a large sign swaying in a draft, can be enough to activate a poorly tuned system.
Get Inspired by Rayzeek Motion Sensor Portfolios.
Doesn't find what you want? Don't worry. There are always alternate ways to solve your problems. Maybe one of our portfolios can help.
The Physics of Focus: How Passive Infrared Sensing Works

To command a PIR sensor, you must first understand its mechanism. The “passive” in its name means it emits no energy. It is an observer, monitoring the infrared landscape of the space it oversees. Its intelligence lies in how it interprets changes to that landscape.
A PIR sensor operates using two key components: a pyroelectric sensor that generates a voltage when exposed to changing thermal radiation, and a multi-faceted Fresnel lens. This lens is not a simple magnifier. It is an array of smaller lenses that divides the sensor’s field of view into a grid of distinct detection zones. Each facet focuses the infrared energy from a specific slice of the room onto the pyroelectric element, establishing a baseline thermal reading for each zone.
A sensor doesn’t trigger because it sees a warm object. It triggers when a warm object moves from one detection zone to another. When a person walks into the field of view, their body crosses the boundary from one lens-defined zone into the next. This movement creates a rapid differential in the energy hitting the pyroelectric element: first a positive change as the person enters a zone, then a negative change as they leave it. This distinct, rapid fluctuation is the specific signal the sensor recognizes as movement. A warm but stationary object simply becomes part of the baseline and is ignored.
Engineering Loyalty: A Framework for Human-Centric Detection

The solution to false triggers isn’t to find a sensor that can identify a human, but to create a detection environment where only a human can produce the required trigger signal. This is achieved by deliberately manipulating the sensor’s field of view.
The most powerful tool for this is sensor placement. By mounting a sensor at a significant height and aiming it downward at a steep angle, its detection zones become a predictable pattern on the floor. This creates a clear boundary. The area directly beneath the sensor is highly sensitive, while areas further away are completely outside its line of sight. In a showroom, this strategy focuses the sensor’s attention exclusively on pedestrian walkways. The sensor is elevated above the lighting grid and aimed so its field of view covers the aisles but stops short of the vehicle display pods. The hoods and engine blocks of the cars, regardless of their thermal state, are now geometrically excluded from the sensor’s perception.
For even greater refinement, masking provides surgical control. This involves physically or digitally blocking specific facets of the sensor’s lens, deactivating the corresponding detection zones. If a sensor’s view must unavoidably cover the front grill of a car, the precise lens facets corresponding to that location can be masked with an opaque adhesive or a digital setting. The sensor remains fully active for all other zones but is now blind to the heat plume from the engine. It has been taught to ignore the problem.
Looking For Motion-Activated Energy-Saving Solutions?
Contact us for complete PIR motion sensors, motion-activated energy-saving products, motion sensor switches, and Occupancy/Vacancy commercial solutions.
From Principle to Practice: The Car Showroom Case Study
Applying this framework transforms the showroom from a chaotic light show into a responsive, elegant space. A flawed implementation—placing a standard, wall-mounted sensor at a low height—would cast a wide, sweeping field of view over both the aisle and the cars. It would trigger constantly from engine heat and reflections, rendering the system useless.
The engineered solution uses a network of elevated PIR sensors. Each is mounted 15 to 20 feet high, positioned over the center of the pedestrian aisles and aimed sharply downward. This geometry ensures the detection zones cover the walking path but don’t spill onto the polished surfaces or engine bays of the vehicles. For any unavoidable overlap, precise masking blinds the sensor to the front of the cars.
Maybe You Are Interested In

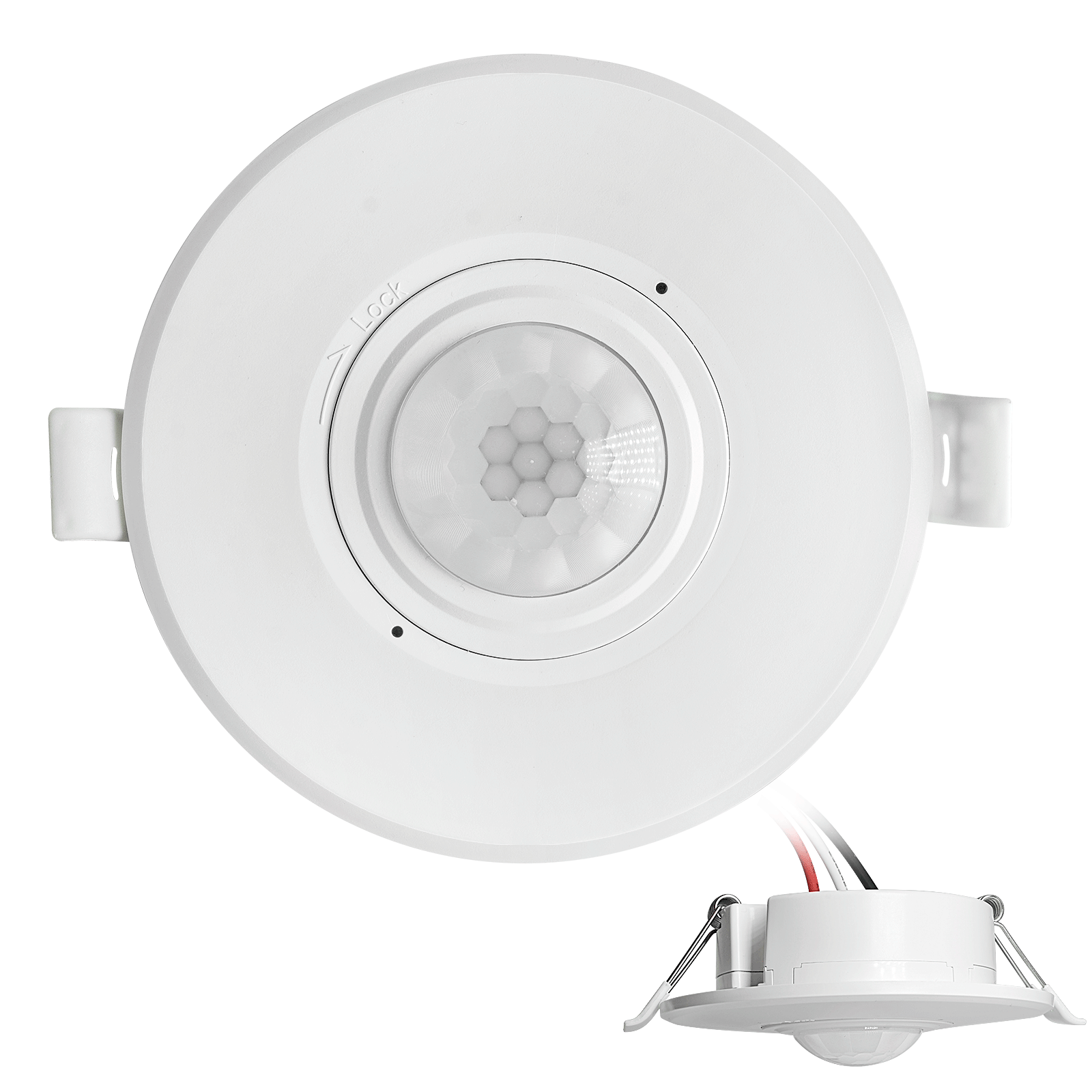
- Ceiling-mounted PIR occupancy sensor with dry-contact relay output
- 12/24VDC or 12/24VAC low-voltage supply
- COM, NO, and NC isolated relay contacts for EMS, HVAC, and building control inputs

- Low-voltage DC recessed ceiling-mounted microwave motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- 10A max work current with adjustable time delay, Lux threshold, and sensitivity
- Higher-load recessed ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Recessed ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Ceiling-mounted RZ037 PIR occupancy sensor dimmer for 220V power
- 3A maximum working current with 660W rated load
- LUX button controls light-sensor ON/OFF and user-set dimming brightness
- Ceiling-mounted RZ037 PIR occupancy sensor dimmer for 110V power
- 3A maximum working current with 330W rated load
- LUX button controls light-sensor ON/OFF and user-set dimming brightness

- Low-voltage DC ceiling-mounted microwave motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- 10A max work current with adjustable time delay, Lux threshold, and sensitivity
- Higher-load ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Low-voltage DC recessed ceiling mount PIR motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- Max work current 10A with adjustable time delay, Lux threshold, and sensitivity
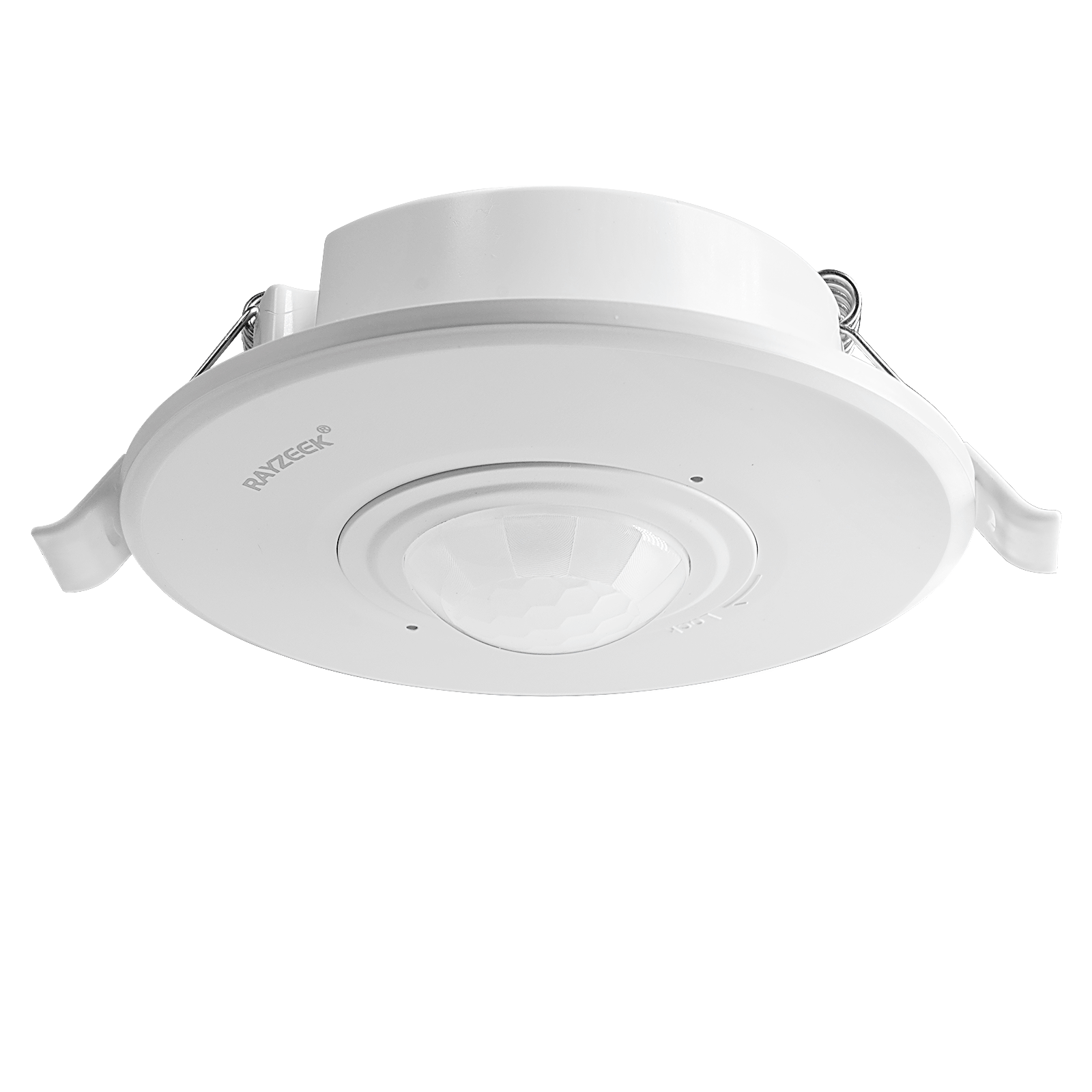
- Higher-load recessed ceiling mount PIR motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 360-degree detection with adjustable time delay, Lux threshold, and sensitivity
- Recessed ceiling mount PIR motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 360-degree detection with adjustable time delay, Lux threshold, and sensitivity
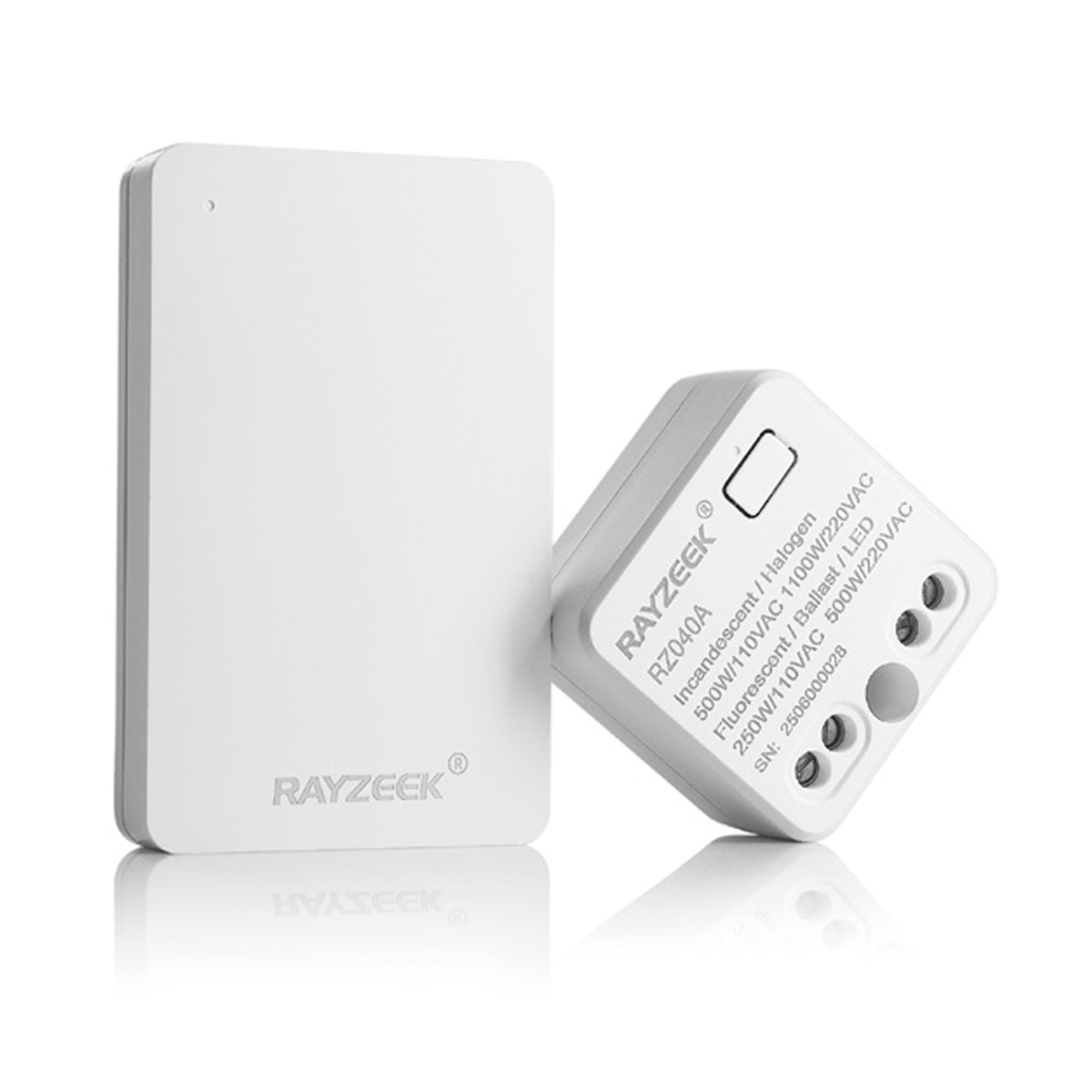
- Wireless switch and receiver kit for indoor ON/OFF lighting control
- 100-230VAC, 50/60Hz receiver with 5A rated current
- CR2032-powered wireless switch with 2.4GHz communication
- Occupancy (Auto-ON/Auto-OFF)
- 12–24V DC (10–30VDC), up to 10A
- 360° coverage, 8–12 m diameter
- Time delay 15 s–30 min
- Light sensor Off/15/25/35 Lux
- High/Low sensitivity
- Auto-ON/Auto-OFF occupancy mode
- 100–265V AC, 10A (neutral required)
- 360° coverage; 8–12 m detection diameter
- Time delay 15 s–30 min; Lux OFF/15/25/35; Sensitivity High/Low
- Auto-ON/Auto-OFF occupancy mode
- 100–265V AC, 5A (neutral required)
- 360° coverage; 8–12 m detection diameter
- Time delay 15 s–30 min; Lux OFF/15/25/35; Sensitivity High/Low

- 100V-230VAC
- Transmission Distance: up to 20m
- Wireless motion sensor
- Hardwired control

- Voltage: 2x AAA Batteries / 5V DC (Micro USB)
- Day/Night Mode
- Time delay: 15min, 30min, 1h(default), 2h

- EU plug power adapter

- UK plug power adapter
The result is a system completely ignorant of the multi-ton, heat-emitting machines surrounding it. It only sees a person crossing from one detection zone to the next in the designated walkway. This targeted approach is fundamentally different from technologies like microwave sensing, which passes through objects, or simple camera systems that can be defeated by lighting changes.
Refining the Experience: Beyond Simple On-and-Off
Accurate triggering is only the first step. The quality of a motion-activated system is also defined by its behavior, governed by timeout and sensitivity settings. A system that feels “twitchy,” turning off the instant a person stops moving or triggering from a minor thermal event, is perceived as cheap and unreliable.
A properly calibrated system uses a measured timeout, holding the lights on for a grace period of several minutes after the last detected motion. This prevents the lights from extinguishing if a person pauses. Sensitivity must be tuned to the environment—high enough to detect a person walking but low enough to ignore minor thermal noise from HVAC drafts. In environments with extreme ambient temperatures, where the difference between a human body and the background is reduced, a higher-sensitivity sensor may be necessary. Even then, the core principles of geometric exclusion and masking remain the primary tools for ensuring accuracy.







