Das Versprechen eines intelligenten Heims stirbt oft um zwei Uhr morgens, wenn eine Katze einen Bewegungsmelder auslöst und das Wohnzimmer mit Licht überschwemmt. Es stirbt, wenn der Hund, der im Flur herumläuft, einen Schalter aktiviert, der nur für Menschen bestimmt ist, oder wenn ein Vorhang, der im Wind weht, fälschlicherweise für Belegung gehalten wird. Innerhalb weniger Wochen hat der frustrierte Hausbesitzer entweder die Empfindlichkeit des Sensors so weit reduziert, dass er tatsächliche Personen übersieht, oder die Automatisierung ganz deaktiviert. Die beabsichtigte Effizienz wird zu einer Belästigung, und teure Hardware bleibt ungenutzt.
Dies ist kein Versagen der Technologie. Es ist ein Fehler in der Konfiguration. Die Physik, die es einem Sensor ermöglicht, Bewegung zu erkennen, unterscheidet nicht grundsätzlich zwischen einem Deutschen Schäferhund und einem erwachsenen Menschen. Aber die Unterschiede darin, wie diese beiden Subjekte Raum einnehmen, Wärme erzeugen und sich bewegen, sind real und nutzbar. Mit der richtigen Einstellung können diese Unterschiede in eine zuverlässige Unterscheidung umgewandelt werden.
Die Lösung sind nicht empfindlichere Hardware oder teure KI-gestützte Kameras. Es ist die disziplinierte Anwendung dreier mechanischer Strategien: die Formung des vertikalen Sichtfelds des Sensors, die bewusste Wahl der Montagehöhe und die Abstimmung der Empfindlichkeitsschwellen. Zusammen genutzt, reduzieren diese Techniken Fehlalarme durch Haustiere und zufällige Bewegungen erheblich, während die zuverlässige Erkennung von Menschen erhalten bleibt. Das Ergebnis ist eine Automatisierung, die funktioniert.
Das Problem der Aufgabe: Wenn Haustiere die Automatisierung zerstören
Der Kreis ist deprimierend vertraut. Ein neuer Bewegungsmelder wird mit Werkseinstellungen installiert, oft in einer bequemen Höhe, anstatt in einer optimalen. Für einige Tage funktioniert er einwandfrei. Lichter gehen beim Betreten eines Raums an. Das System wirkt intelligent.
Dann beginnt die Katze ihre nächtliche Patrouille. Der Hund bewegt sich unruhig von einem Schlafplatz zum anderen. Der Sensor löst aus, die Lichter gehen an, und der Schlaf wird gestört. Anfangs nur eine Belästigung. Aber bei Dutzenden von Fehlaktivierungen pro Woche wird das Problem systemisch. Der Hausbesitzer reagiert, indem er die Empfindlichkeit verringert. Das hilft eine Zeit lang. Aber bald beginnt das System, tatsächliche menschliche Präsenz zu übersehen — eine Person, die sich langsam bewegt, aus einem ungewöhnlichen Winkel eintritt oder am Rand des Erkennungsbereichs läuft. Die Automatisierung ist in beide Richtungen unzuverlässig geworden.
Aufgeben ist die einzige rationale Reaktion. Der versprochene Komfort hat sich in eine Wartungsaufgabe verwandelt. Die Hardware bleibt an der Wand, träge, während die Haushaltsmitglieder wieder von Hand Schalter umlegen. Dieses Ergebnis ist nicht selten; es ist die vorherrschende Fehlermethode bei Bewegungskontrolle in Haushalten mit Haustieren. Der Verlust ist nicht nur die Kosten für die Hardware, sondern auch die laufende Energieverschwendung, die das System verhindern sollte.
Wie Bewegungssensoren überhaupt etwas erkennen

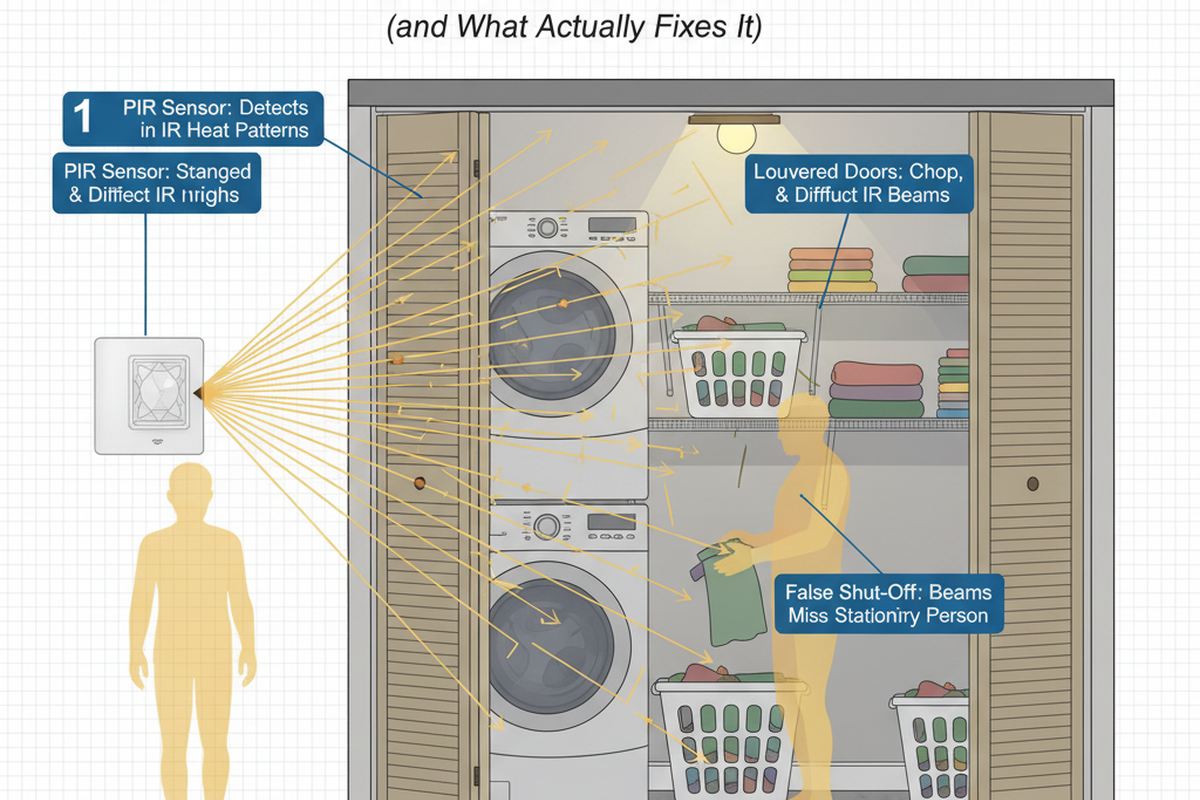
Passive Infrarot (PIR)-Sensor, das Arbeitstier der Hausautomation, sind im Wesentlichen Hitze-Differential-Detektoren. Jeder Gegenstand, der wärmer als der absolute Nullpunkt ist, emittiert Infrarotenergie. Ein PIR-Sensor verwendet ein spezielles pyroelectrisches Element, das typischerweise in zwei oder mehr Zonen unterteilt ist, um Veränderungen in diesem Umgebungs-Infrarotfeld zu messen. Wenn sich ein warmer Körper von einer Zone in eine andere bewegt, erzeugt das Element eine winzige Spannungsdifferenz. Überschreitet dieses Signal eine festgelegte Schwelle, meldet der Sensor eine Erkennung.
Suchen Sie nach bewegungsaktivierten Lösungen zum Energiesparen?
Wenden Sie sich an uns, wenn Sie komplette PIR-Bewegungsmelder, bewegungsaktivierte Energiesparprodukte, Bewegungsmelderschalter und kommerzielle Präsenz-/Leerstandslösungen benötigen.
Ein PIR-Sensor “sieht” nicht im visuellen Sinne. Er registriert thermische Bewegung. Deshalb erkennt er eine Katze ebenso wie eine Person. Beide sind warme Körper, die einen Temperaturkontrast zu einer kühleren Wand oder Boden bilden. Wenn sich die Katze bewegt, wechselt sie zwischen den Erkennungszonen des Sensors, wobei das gleiche Signal erzeugt wird, wie es eine Person tun würde. Das Signal einer Person könnte stärker sein, aber das grundlegende Ereignis ist identisch. Der Sensor hat keine inhärente Vorstellung von Größe oder Höhe. Er reagiert nur auf Veränderung.
Mikrowellensensoren verwenden ein anderes Prinzip, stoßen aber auf dasselbe Problem. Sie senden ein kontinuierliches, niederfrequentes Funksignal aus und hören auf Dopplerverschiebungen in der Reflexion. Jeder Gegenstand, der sich auf den Sensor zubewegt oder von ihm wegbewegt, ändert die Frequenz der reflektierten Welle. Ein Hund, der durch den Raum trottet, erzeugt eine Dopplerverschiebung, die genauso messbar ist wie die einer Person. Wie der PIR erkennt der Mikrowellensensor nur, dass sich etwas bewegt, nicht was sich bewegt.
Standardmäßig sind beide Sensortypen so konzipiert, dass sie inklusiv sind. Sie sind gebaut, um Bewegung zu erkennen, was ideal für ein Sicherheitssystem ist, aber katastrophal für Hausautomatisierung, die nur auf Menschen reagieren soll. irgendeines Ohne spezifische Einschränkungen melden die Sensoren fleißig jede Bewegung, jede schaukelnde Vorhang und sogar ein großes Insekt, das direkt über die Linse kriecht.
Die ausnutzbaren Unterschiede zwischen Haustieren und Menschen
Wie bringen wir also einen einfachen Sensor dazu, klüger zu sein? Wir nutzen die physischen Unterschiede zwischen Menschen und Haustieren aus.

Der erste und zuverlässigster Unterschied ist die vertikale Positionierung. Ein stehender oder sitzender Erwachsener nimmt einen Höhenbereich ein, den eine Katze oder ein kleiner Hund einfach nicht erreicht. Selbst ein großer Hund auf all vieren hält seine Körperwärme und Masse viel niedriger zum Boden als ein menschlicher Oberkörper. Die meiste menschliche Bewegung findet über drei Fuß vom Boden entfernt statt; die Bewegung der Haustiere konzentriert sich auf die niedrigsten zwei Fuß. Diese vertikale Trennung ist unser Hauptvorteil.
Der zweite Unterschied ist die Größe des Wärmesignals. Ein menschlicher Körper ist eine größere Infrarotquelle als ein kleines Tier und verteilt sich über eine größere vertikale Fläche. Das bedeutet, dass eine Person in der Regel ein stärkeres, langanhaltenderes Signal erzeugt. Dieser Faktor ist jedoch weniger zuverlässig als die Höhe, da die Entfernung die Dinge verkompliziert. Eine Katze ganz in der Nähe des Sensors kann ein so starkes Signal wie eine weiter entfernte Person erzeugen. Die Größe ist ein nützliches sekundäres Filter, aber sie kann nicht das einzige sein.
Der dritte Unterschied, das Bewegungsmuster, ist der schwächste von allen. Menschen und Haustiere bewegen sich beide mit variabler Geschwindigkeit. Wenn eine Person nachts auf Zehenspitzen geht, bewegt sie sich vielleicht so langsam wie eine auf Beutezug befindliche Katze. Ein Hund, der zur Tür losläuft, bewegt sich schneller als ein Mensch, der geht. Während einige fortschrittliche Systeme versuchen, Gangarten zu analysieren, sind diese Methoden für die meisten Haushalte zu fragil. Für unsere Zwecke ist das Bewegungsmuster keine zuverlässige Variable.
Vertikale Sichtfeld-Formung: Konstruktion von toten Zonen

Die effektivste Strategie ist, einen konstruierten toten Winkel zu schaffen. Die Formung des Sichtfelds schränkt den Erkennungsbereich des Sensors absichtlich ein, um die vertikale Zone auszuschließen, in der Haustiere leben und sich bewegen. Dies ist eine mechanische Lösung, kein Software-Filter.
Die Fresnel-Linse eines PIR-Sensors ist segmentiert, um Infrarotenergie aus bestimmten Winkeln auf das Erkennungselement zu fokussieren. Durch das physische Maskieren von Teilen dieser Linse oder durch die Verwendung einer Linse mit absichtlichen toten Zonen können wir den Sensor in Bezug auf den unteren Bereich seines Sichtfelds blind machen. Der bodennahe Bereich wird einfach aus der Erkennungsgeometrie entfernt.
Ein richtig geformter „haustierunempfindlicher“ Sensor hat eine tote Zone, die vom Boden bis etwa zweieinhalb Fuß reicht. Eine Katze, die direkt darunter läuft, ist unsichtbar; die Infrarotenergie, die sie aussendet, wird niemals auf die aktiven Zonen des Sensors fokussiert. Wenn aber eine Person den gleichen Raum betritt, bewegen sich Oberkörper und Kopf durch die aktiven oberen Zonen, und der Sensor löst sofort aus. Dies ist kein Wahrscheinlichkeitsspiel, sondern eine geometrische Gewissheit. Der Sensor kann den Boden nicht sehen, genau wie eine auf die Decke gerichtete Kamera nicht.
Diese Technik ist bemerkenswert effektiv, hat aber Grenzen. Das eine ist ein sehr großer Hund, dessen Kopf und Schultern gerade die untere Kante der aktiven Zone überschreiten könnten. Das andere ist ein kletterndes Haustier. Eine Katze, die auf eine Arbeitsplatte oder die Rückenlehne eines Sofas springt, hebt sich in das aktive Feld und löst den Sensor aus. Das sind keine Fehler der Methode, sondern eine Anerkennung ihrer Grenzen.
Montagehöhe als Grundlage
Je höher ein Sensor montiert ist, desto steiler wird sein nach unten gerichteter Blickwinkel. Dieser steile Winkel komprimiert das vertikale Sichtfeld und erhöht effektiv die untere Grenze der Erkennung. Bei sechs Fuß kann ein Sensor eine tote Zone von zwei Fuß vom Boden entfernt haben. Montiert man denselben Sensor bei acht Fuß, kann die tote Zone auf fast drei Fuß ansteigen. Höhe ist die Grundlage der Haustierunempfindlichkeit.
Aus diesem Grund sind Montageanleitungen für haustierunempfindliche Sensoren so spezifisch bzgl. der Montagehöhe. Ein bei Standard-Schalterhöhe (etwa vier Fuß) montierter Sensor hat einen flachen nach unten gerichteten Winkel und fast keine Boden-Tote Zone. Er sieht alles. Derselbe Sensor, bei sieben oder acht Fuß montiert, gewinnt erheblichen Schutz, weil das Wärmesignatur des Haustiers, die sich nahe am Boden konzentriert, niemals den aktiven Erkennungsbereich des Sensors schneidet.
Lassen Sie sich von den Portfolios der Rayzeek-Bewegungssensoren inspirieren.
Sie haben nicht gefunden, was Sie suchen? Keine Sorge! Es gibt immer alternative Möglichkeiten, Ihre Probleme zu lösen. Vielleicht kann eines unserer Portfolios helfen.
Der Kompromiss ist eine leichte Reduzierung der horizontalen Abdeckung, da ein hoch montierter Sensor eine kleine tote Zone direkt darunter erzeugt. Für die meisten Räume ist das kein Problem. In sehr großen Räumen ist es möglicherweise besser, zwei strategisch platzierte Sensoren zu verwenden, anstatt eines einzigen an einer kompromittierten Höhe.
Wenn Sie keine Löcher bohren können, werden Sie kreativ. Verwenden Sie ein hohes Bücherregal, eine freistehende Stange oder eine Halterung an einem Möbelstück, um den Sensor auf die notwendige Höhe zu bringen. Die Montagemethode ist zweitrangig; die Höhe ist alles.
Empfindlichkeitsstufen: Der letzte Drehregler
Empfindlichkeit definiert die minimale Signalstärke, die erforderlich ist, um eine Erkennung auszulösen. Stellen Sie es sich wie einen Lautstärkeregler vor. Eine niedrigere Empfindlichkeit erhöht die erforderliche Signalschwelle, was bedeutet, dass eine größere oder näher gelegene Wärmequelle erforderlich ist, um ein Ereignis auszulösen.
Nachdem die Formung des Sichtfelds und die Montagehöhe die Schwerarbeit erledigt haben, dient die Empfindlichkeitseinstellung als letzter Filter. Sie hilft, Randfälle zu verwalten, wie z. B. einen großen Hund, dessen Schulter gerade die aktive Zone streift, oder eine Katze, die gelegentlich auf einen niedrigen Tisch klettert. Durch das Einstellen der Empfindlichkeit auf ein Niveau, das zuverlässig einen Menschen erkennt, aber unterhalb der Schwelle für diese kleinen Haustiersignale liegt, gewinnen Sie einen zusätzlichen Spielraum für Fehler.
Vielleicht sind Sie interessiert an

- Belegung (Auto-EIN/Auto-AUS)
- 12–24V DC (10–30VDC), bis zu 10A
- 180° Abdeckung, 8–12 m Durchmesser
- Zeitschaltung 15 s–30 min
- Lichtsensor aus/15/25/35 Lux
- Hohe/niedrige Empfindlichkeit
- Auto-ON/Auto-OFF Belegungsmodus
- 100–265V AC, 10A (Neutralleiter erforderlich)
- 360° Abdeckung; Erkennungsdurchmesser 8–12 m
- Zeitverzögerung 15 s–30 min; Lux AUS/15/25/35; Empfindlichkeit Hoch/Niedrig
- Auto-ON/Auto-OFF Belegungsmodus
- 100–265V AC, 5A (Neutralleiter erforderlich)
- 360° Abdeckung; Erkennungsdurchmesser 8–12 m
- Zeitverzögerung 15 s–30 min; Lux AUS/15/25/35; Empfindlichkeit Hoch/Niedrig

- 100V-230V Wechselspannung
- Übertragungsreichweite: bis zu 20m
- Drahtloser Bewegungssensor
- Festverdrahtete Steuerung

- Spannung: 2x AAA-Batterien / 5V DC (Micro-USB)
- Tag/Nacht-Modus
- Zeitverzögerung: 15min, 30min, 1h (Standard), 2h

- EU-Steckernetzteil

- UK-Steckernetzteil
- US-Steckernetzteil

- 5V DC
- Übertragungsdistanz: bis zu 30m
- Tag/Nacht-Modus

- 5V DC
- Übertragungsdistanz: bis zu 30m
- Tag/Nacht-Modus

- Spannung: 2 x AAA
- Übertragungsdistanz: 30 m
- Zeitverzögerung: 5s, 1m, 5m, 10m, 30m

- Laststrom: 10A Max
- Auto/Schlafmodus
- Zeitverzögerung: 90s, 5min, 10min, 30min, 60min

- Laststrom: 10A Max
- Auto/Schlafmodus
- Zeitverzögerung: 90s, 5min, 10min, 30min, 60min

- Laststrom: 10A Max
- Auto/Schlafmodus
- Zeitverzögerung: 90s, 5min, 10min, 30min, 60min

- Laststrom: 10A Max
- Auto/Schlafmodus
- Zeitverzögerung: 90s, 5min, 10min, 30min, 60min

- Laststrom: 10A Max
- Auto/Schlafmodus
- Zeitverzögerung: 90s, 5min, 10min, 30min, 60min

- Laststrom: 10A Max
- Auto/Schlafmodus
- Zeitverzögerung: 90s, 5min, 10min, 30min, 60min

- Belegungsmodus
- 100V ~ 265V, 5A
- Neutralleiter erforderlich
- 1600 sq ft
- Spannung: DC 12v/24v
- Modus: Auto/EIN/AUS
- Zeitverzögerung: 15s~900s
- Dimmen: 20%~100%

- Belegung, Leerstand, ON/OFF-Modus
- 100~265V, 5A
- Neutralleiter erforderlich
- Passend für die UK Square Backbox
Das Finden des idealen Bereichs erfordert Iteration, nicht Berechnung. Der Unterschied in der Signalstärke zwischen einer kleinen Person am Rand des Raums und einem großen Hund in der Nähe der Mitte kann schmal sein. Stellen Sie es zu niedrig ein, und Sie werden Menschen verpassen. Stellen Sie es zu hoch ein, löst der Hund aus. Das Ziel ist es, den Punkt zu finden, an dem die Menschenerkennung zuverlässig ist und die Haustier-Auslöser auf eine tolerierbare, nahezu null Frequenz reduziert werden. Einige fortgeschrittene Sensoren ermöglichen sogar unterschiedliche Empfindlichkeitsstufen für Tag und Nacht, um die Regeln bei den störungsreichsten Zeiten zu verschärfen.
Warum nur Mikrowellen in kleinen Häusern scheitern
Mikrowellensensoren werden manchmal als überlegen beworben, die theoretisch in der Lage sind, Geschwindigkeit und Masse eines Objekts anhand seines Doppler-Signatur zu analysieren. In einem weiten offenen Raum kann das funktionieren. In einem kleinen, möblierten Raum versagt die Physik.
Das Problem ist Mehrwege-Reflexion. Das Signal des Sensors reist nicht nur zum Ziel und zurück; es reflektiert an Wänden, Möbeln und Geräten. Diese Reflexionen erzeugen eine geräuschvolle, chaotische Signalenvironment. Eine kleine, bewegliche Katze kann aufgrund konstruktiver Interferenz durch Reflexionen viel größer erscheinen, während eine Person kleiner erscheinen kann durch destruktive Interferenz. Die Fähigkeit des Sensors, anhand der Größe zu unterscheiden, wird dadurch völlig unzuverlässig. In einer typischen Küche oder im Schlafzimmer erzeugt ein Mikrowellensensor oft mehr Fehlalarme durch Haustiere als ein schlecht konfigurierter PIR.
Dual-Technologie-Sensoren, die PIR und Mikrowelle kombinieren und erfordern, dass beide zustimmen, bevor ausgelöst wird, sind ein viel besserer Ansatz. Das PIR bietet die robuste geometrische Unterscheidung durch Höhen- und Sichtfeldgestaltung. Die Mikrowelle fügt eine sekundäre Bewegungserkennung hinzu. Eine Katze auf dem Boden könnte den Mikrowellensensor mit verzerrten Reflexionen täuschen, aber sie wird im unteren, maskierten Bereich des PIR unsichtbar sein. Da beide nicht auslösen, wird der Alarm unterdrückt, wodurch die überwiegende Zahl der Fehlalarme herausgefiltert wird.
Testkonfiguration mit absichtlichen Pfaden.
Ein konfigurierte Sensor ist eine untestbare Hypothese. Um sie zu validieren, benötigen Sie eine strukturierte Durchlaufprüfung.
Das Testverfahren ist einfach:
- Gehen Sie die Überwachungsfläche in normalem Tempo von jedem Eingang aus durch. Bestätigen Sie, dass der Sensor zuverlässig auslöst.
- Testen Sie die Grenzen. Gehen Sie langsam und an den äußersten Rändern des Raums, um die Grenzen der Menschenerkennung zu finden.
- Lassen Sie Ihre Haustiere frei herumlaufen. Beobachten Sie, ob ihre normalen Pfade, insbesondere direkt unter dem Sensor, einen Auslöser verursachen.
- Wenn möglich, fördern Sie das Klettern. Locken Sie die Katze auf das Sofa oder ein niedriges Regal, um zu sehen, ob diese spezielle Aktion einen Fehlalarm erzeugt.
- Passen Sie an und wiederholen Sie. Wenn ein großer Hund den Sensor weiterhin auslöst, versuchen Sie, die Empfindlichkeit zu verringern oder die Montagehöhe um sechs Zoll zu erhöhen, und führen Sie den Test erneut durch.
Dieses iterative, praktische Testen liefert Feedback, das viel wertvoller ist als jedes Datenblatt. Denken Sie daran, das Ziel ist nicht nur ein technisch perfektes System, sondern eines, das ohne Stress für Ihre Tiere funktioniert. Eine Einrichtung, die funktioniert, aber den Hund wegen plötzlicher Lichter nervös macht, ist gescheitert. Das wahre Zeichen des Erfolgs ist ein so fein abgestimmtes System, dass Ihre Haustiere nicht einmal wissen, dass es da ist.