Het is een vertrouwde ervaring in self-storage faciliteiten en gebouwen met lange, effen gangen. Een klant duwt een kar in een donker gangpad, en de lichten gaan aan een moment te laat aan, ofwel recht boven of, nog erger, net achter hen. Ze worden gedwongen om constant vooruit te duwen in de duisternis, wat een voortdurend gevoel geeft dat ze altijd één stap achterlopen. Het is een kleine ontwerpfout die een aanzienlijk gevoel van onrust en goedkoopheid creëert. De oplossing is niet om bestaande systemen gevoeliger te maken, maar om ze slimmer te maken.
Dit probleem van 'lichtvertraging' kan permanent worden opgelost met een systematische aanpak die de verlichting van een gebouw transformeert van een reactief systeem naar een anticiperend systeem. Door zorgvuldig de plaatsing, doelgerichtheid en timing van sensoren te plannen, kun je een naadloze ervaring creëren waarbij het pad altijd goed verlicht is voordat een persoon aankomt, en hen vooruit leidt alsof door een onzichtbare hand. Deze methode zorgt ervoor dat klanten nooit meer hun kar in de duisternis hoeven te duwen.
Het Probleem van de Gemeenschappelijke Gang: Het naargevena licht achterna
In een standaard beweging-activatiesysteem controleert een enkele sensor een toegewijd zone van lichten. Wanneer een persoon die zone binnengaat, detecteert de sensor beweging en schakelt de armaturen in. In een lange gang zorgt dit voor een onsamenhangende ervaring van het bewegen van het ene licht naar het andere. Het systeem reageert altijd op aanwezigheid, niet op intentie te anticiperen. Als gevolg daarvan staat de gebruiker voortdurend op de rand van de detectiezone, en activeert hij het licht net op het moment dat hij arriveert, waardoor hij de lichten 'achterna' moet lopen door de gang—een constant herinnering dat het systeem achterloopt.
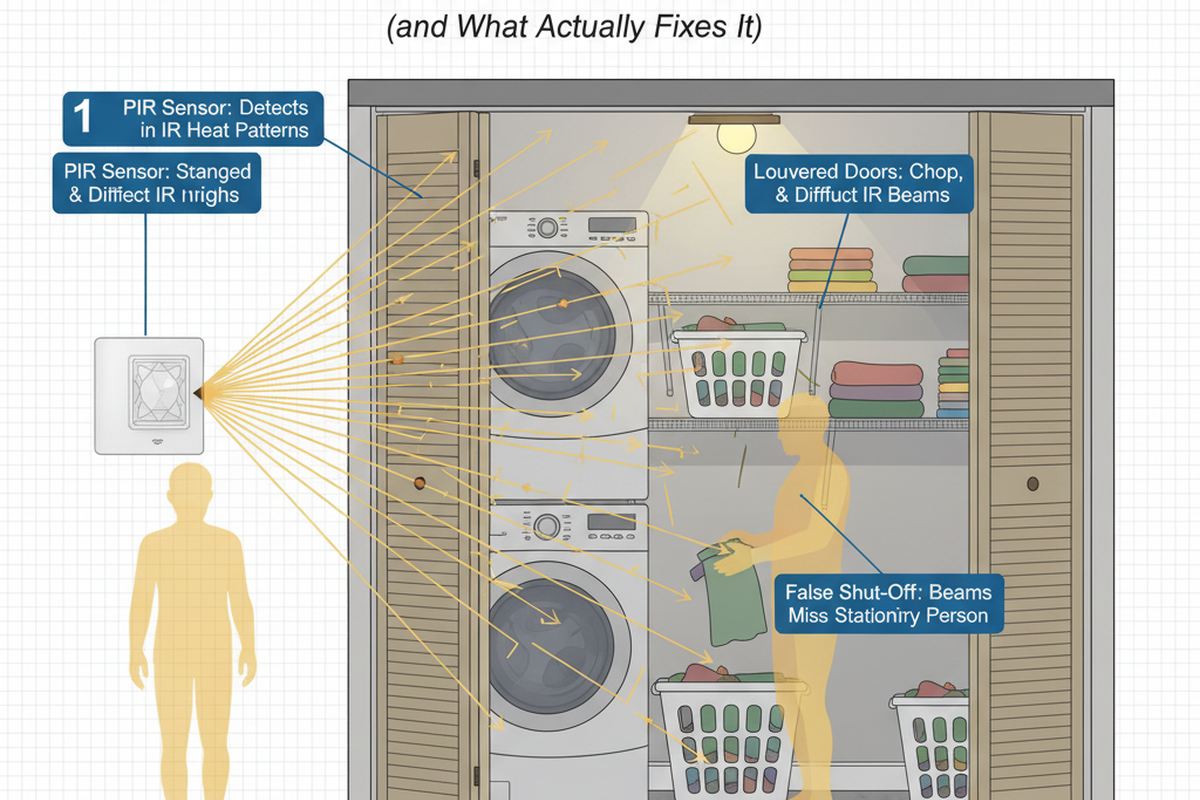
De Gevoeligheidval: Waarom het verhogen van de stand meer problemen veroorzaakt
De meest voorkomende reactie op lichtvertraging is om de gevoeligheid van de bewegingssensoren te verhogen. De logica lijkt kloppend: een gevoeliger sensor zou beweging van verder weg moeten detecteren en de lichten eerder moeten activeren. In de praktijk werkt deze benadering vaak averechts en brengt het nieuwe problemen met zich mee.
Onjuiste triggers door verkeer in kruisen van gangen
Instellingen met een hoge gevoeligheid maken sensoren, vooral passieve infrarood (PIR) types, zeer gevoelig voor het detecteren van beweging buiten hun bedoelde zone. In een self-storage faciliteit betekent dit dat iemand die door een hoofdgang loopt, lichten in een kruising kan activeren die hij niet van plan is te betreden. Deze kruis-gang activatie verspilt energie en creëert een afleidend 'lichtshow'-effect, met lege gangen die constant aan- en uitgaan. Het systeem wordt lawaaierig en inefficiënt, doordat het één probleem oplost en een ander creëert.
De afnemende meerwaarde van hoge gevoeligheid
Boven een bepaald punt levert het verhogen van de gevoeligheid geen voordeel meer voor vroege detectie op een lange, smalle route. Het vermogen van een sensor om beweging te detecteren is afhankelijk van het lensontwerp en de aard van de beweging. Beweging recht op de sensor af of ervan vandaan is inherent moeilijker te detecteren dan beweging die het gezichtsveld kruist. Het verhogen van de gevoeligheid verandert deze fundamentele beperking niet; het maakt de sensor alleen beter in het oppikken van kleine, tangentiële bewegingen—vaak de bron van valse triggers. Het kernprobleem van het detecteren van voorwaartse beweging op afstand blijft onopgelost.
Het fundamentale principe: Van reactie naar anticipatie
Als het verhogen van de gevoeligheid niet de oplossing is, wat dan wel? De oplossing vereist een wijziging in denken: in plaats van te proberen een reactief systeem sneller te maken, is het doel een anticiperend systeem te ontwerpen dat gebruikmaakt van geometrie en logica om het pad van een gebruiker te voorspellen. De verlichting moet geen reactie zijn op waar de persoon zich bevindt, maar een voorbereiding op waar hij naartoe gaat. Dit wordt bereikt door drie gecoördineerde principes: afstand, doelgerichtheid en temporele logica.
Pijler 1: Geometrische afstand en de gestaffelde sensorindeling
Een enkele sensor, hoe krachtig ook, is een enkel punt van falen met een beperkte detectiezone. De sleutel tot effectieve corridorbedekking is het gebruik van meerdere sensoren in een opstelling die continue, overlappende gezichtsvelden creëert. De meest effectieve geometrie hiervoor is een gestaffelde opstelling. In plaats van sensoren in een rechte lijn langs het midden van de gang te plaatsen, worden ze afwisselend aan één kant van de gang geplaatst en aan de andere kant.
Misschien bent u geïnteresseerd in

- Bezetting (Auto-AAN/Auto-UIT)
- 12–24V DC (10–30VDC), tot 10A
- 360° bereik, diameter 8–12 m
- Tijdvertraging 15 s–30 min
- Lichtsensor Uit/15/25/35 Lux
- Hoge/Low gevoeligheid
- Auto-Aan/Auto-Uit bezettingsmodus
- 100–265V AC, 10A (neutraal vereist)
- 360° bereik; detectiebereik van 8–12 m
- Tijdvertraging 15 s–30 min; Lux UIT/15/25/35; Gevoeligheid Hoog/Laag
- Auto-Aan/Auto-Uit bezettingsmodus
- 100–265V AC, 5A (neutraal vereist)
- 360° bereik; detectiebereik van 8–12 m
- Tijdvertraging 15 s–30 min; Lux UIT/15/25/35; Gevoeligheid Hoog/Laag

- 100V-230VAC
- Transmissieafstand: tot 20m
- Draadloze bewegingssensor
- Vastgebaseerde bediening

- Voltage: 2x AAA Batterijen / 5V DC (Micro USB)
- Dag/nachtmodus
- Tijdvertraging: 15min, 30min, 1h (standaard), 2h

- EU-stekkeradapter

- UK-stekkeradapter
- US stekker voedingsadapter

- 5V DC
- Transmissieafstand: tot 30m
- Dag/Nacht modus

- 5V DC
- Transmissieafstand: tot 30m
- Dag/Nacht modus

- Voltage: 2 x AAA
- Transmissieafstand: 30 m
- Tijdsvertraging: 5s, 1m, 5m, 10m, 30m

- Belastingsstroom: 10A Max
- Auto/slaapmodus
- Tijdvertraging: 90s, 5min, 10min, 30min, 60min

- Belastingsstroom: 10A Max
- Auto/slaapmodus
- Tijdvertraging: 90s, 5min, 10min, 30min, 60min

- Belastingsstroom: 10A Max
- Auto/slaapmodus
- Tijdvertraging: 90s, 5min, 10min, 30min, 60min

- Belastingsstroom: 10A Max
- Auto/slaapmodus
- Tijdvertraging: 90s, 5min, 10min, 30min, 60min

- Belastingsstroom: 10A Max
- Auto/slaapmodus
- Tijdvertraging: 90s, 5min, 10min, 30min, 60min

- Belastingsstroom: 10A Max
- Auto/slaapmodus
- Tijdvertraging: 90s, 5min, 10min, 30min, 60min

- Bezettingsmodus
- 100V ~ 265V, 5A
- Neutrale draad vereist
- 1600 m²
- Spanning: DC 12v/24v
- Modus: Auto/AAN/UIT
- Tijdvertraging: 15s~900s
- Dimmen: 20%~100%

- Bezet, Leegstand, AAN/UIT-modus
- 100~265V, 5A
- Neutrale draad vereist
- Past op de UK Square backbox
Overlappende velden elimineren dode zones

Een gespreide indeling zorgt ervoor dat wanneer iemand door de gang loopt, hij nooit in een detectiebereik van een blinde vlek komt. Voordat hij de detectiehoepel van de eerste sensor verlaat, betreedt hij al de hoepel van de tweede, die zich aan de tegenovergestelde muur verderop bevindt. Deze overlapping is cruciaal. Het biedt het systeem doorlopende trackinginformatie en maakt een soepele, voorspellende overdracht mogelijk van de ene verlichtingszone naar de volgende.
Op zoek naar bewegingsgevoelige energiebesparende oplossingen?
Neem contact met ons op voor complete PIR-bewegingssensoren, bewegingsgeactiveerde energiebesparende producten, bewegingssensorschakelaars en commerciële Occupancy/Vacancy-oplossingen.
De juiste sensor kiezen voor lineaire detectie
De effectiviteit van deze indeling wordt versterkt door de keuze van de sensor. Terwijl standaard PIR-sensoren veel voorkomen, kunnen systemen die microgolf- of dual-technologiesensoren gebruiken superieure prestaties bieden in lange gangen. Microgolf sensoren zijn vooral bedreven in het detecteren van beweging richting de sensor, waarmee wordt gecompenseerd voor een PIR-sensor’s belangrijkste zwakte. In een gespreide indeling kan een microgolf sensor die op de gang gericht is, een naderende persoon veel eerder detecteren en zo de essentiële gegevens leveren voor een voorspellend systeem.
Pael 2: Strategische richtingsbaling voor vooruitziende detectie
Plaatsen alleen is niet genoeg; de richting waarin elke sensor is gericht, is net zo belangrijk. De veelgemaakte fout is het monteren van sensoren vlak tegen het plafond of de muur, recht naar beneden of recht over de gang wijzend. Deze oriëntatie minimaliseert hun vermogen om beweging op afstand te detecteren.
De rol van sensorlens en straalvorm
Elke bewegingssensor heeft een lens die het detectiegebied in een specifiek driedimensionaal patroon vormt. Het begrijpen van deze vorm is essentieel voor strategisch richten. Een lens voor lange afstand, bijvoorbeeld, creëert een smalle, langgerekte straal die specifiek voor gangen is ontworpen. Het combineren van de juiste lens met de juiste plaatsing verhoogt de effectiviteit van het systeem. Het doel is om de detectiestraal zo ver mogelijk langs het pad van de gebruiker te projecteren.
Richten voor de weg

Om proactieve detectie te bereiken, moeten sensoren in een gespreide indeling lichtjes naar voren worden gekanteld, in de richting van de reis, en naar beneden gericht langs de gang. Een sensor aan de linker muur moet naar de rechterkant van de gang verderop gericht zijn, en vice versa. Deze vooruitziende oriëntatie cast het detectiehoepel van de sensor ver voor de gebruiker, zodat ze hun nadering kunnen detecteren voordat ze in die zone komen. Het systeem kijkt niet langer alleen naar wat er direct onder staat; het kijkt vooruit naar wat er aankomt.
Pael 3: Tijdelijke logica en pre-triggerbuffers
De laatste pijler gebruikt systeemniveau-intelligentie om de geometrie en de richtingsstrategieën te verbinden. Zelfs met perfecte plaatsing van de sensoren bestaat er een kleine maar merkbare vertraging tussen bewegingsdetectie en lichtactivatie. Een werkelijk naadloos systeem elimineert deze vertraging door gebruik te maken van pre-triggerbuffers. Wanneer een sensor beweging in Zone A detecteert, activeert het controlesysteem niet alleen de lichten in Zone A; het stuurt ook een „pre-trigger” commando naar de lichten in de volgende logische zone, Zone B.
Deze pre-trigger kan op twee manieren werken. Het systeem kan de lichten van Zone B gelijktijdig met die van Zone A activeren, waardoor het volledige pad meteen wordt verlicht. Alternatief kan het een sub-secondenbuffer introduceren, waarbij de lichten van Zone B net vóór de gebruiker binnenkomt worden ingeschakeld, waardoor een dynamische „golf” van licht ontstaat die met hen meebeweegt. Deze temporele logica tilt het systeem op van een reeks onafhankelijke sensoren naar één samenhangend netwerk.
Laat u inspireren door Rayzeek Motion Sensor Portfolio's.
Vind je niet wat je zoekt? Maak je geen zorgen. Er zijn altijd alternatieve manieren om je problemen op te lossen. Misschien kan een van onze portfolio's helpen.
Het volledige systeem: het ontwerpen van een naadloze verlichtingservaring
Wanneer deze drie pijlers—verspreide afstand, naar voren richten en temporele buffers—worden gecombineerd, verdwijnt het probleem van ‘achtervolgen van het licht’. Wordt het verlichtingssysteem van de gang een actieve deelnemer in het begeleiden van de gebruiker.
Een doorloop van de ideale gebruikersreis

In een correct ontworpen systeem wordt een klant die de gang binnenloopt gedetecteerd door de eerste sensor die naar voren is gericht. Direct worden de lichten in de huidige zone en de volgende activeren. Terwijl ze vooruit lopen, bewegen ze door een continu verlichte ruimte. De overlappende, gespreide sensoren volgen hun voortgang, en de logica van het systeem blijft de volgende zone in de reeks activeren ruim voor hun aankomst. Lichten achter hen worden na een ingestelde vertraging uitgeschakeld om energie te besparen. De ervaring is soepel, veilig en voelt moeiteloos intelligent aan.
De principes aanpassen voor hoeken en nisjes
Deze principes zijn aanpasbaar. Voor een hoek van 90 graden moet een sensor net voor de bocht worden geplaatst, gericht op het detecteren van een naderende persoon. De primaire taak van deze sensor is om de verlichting rond de bocht vooraf te triggeren, zodat het nieuwe pad wordt verlicht voordat de gebruiker het zelfs ziet. Voor nisjes of deuropeningen is het brede gezichtsveld van de hoofdgangsensoren vaak voldoende. De sleutel is om het waarschijnlijke pad van verplaatsing te analyseren en sensoren op besluitpunten te plaatsen om altijd de weg vooruit te verlichten.