Je to známá zkušenost v zařízeních samoobslužného úložiště a budovách s dlouhými, bezmála neosobními chodbami. Zákazník tlačí vozík do tmavého koridoru a světla se rozsvítí s momentálním zpožděním, buď přímo nad ním, nebo, což je horší, těsně za ním. Je nucen neustále tlačit dopředu do tmy, což vytváří nepřetržitý pocit, že je krok za ostatními. Je to malá designová chyba, která vytváří výrazný pocit neklidu a levnosti. Řešením není zvyšovat citlivost stávajících systémů, ale je učinit chytřejšími.
Tento problém "zpoždění světla" lze trvale vyřešit systémovým přístupem, který promění osvětlení budovy z reaktivního systému na anticipační. Pečlivým plánováním rozmístění senzorů, zaměřením a časováním můžete vytvořit plynulý zážitek, kdy je cesta vždy dobře osvětlená před příchodem osoby, a vede je vpřed, jako by je vedla neviditelná ruka. Tato metoda zajišťuje, že zákazníci už nikdy nebudou muset tlačit svůj vozík do tmy.
Problém společného corridoru: Lovení světla
V běžném systému s aktivací pohybu řídí jeden senzor vyhrazenou zónu světel. Když osoba vstoupí do této zóny, senzor zaznamená pohyb a zapne svítidla. V dlouhém koridoru to vytváří nesourodý zážitek odchodu od jednoho světelného zdroje k dalšímu. Systém stále reaguje na přítomnost, nikoliv na záměr předvídat. Výsledkem je, že je uživatel stále na okraji detekční zóny a spouští světlo právě při příchodu, což ho nutí "pronásledovat světlo" chodbou – stále mu připomíná, že systém zpoždění zaostává.
Past citlivosti: Proč zvýšení ovladače způsobuje více problémů
Nejčastější reakce na zpoždění světla je zvýšení citlivosti pohybových senzorů. Logika se zdá být správná: citlivější senzor by měl detekovat pohyb z větší vzdálenosti a dříve zapínat světla. V praxi však tento přístup často zpětvází a zavádí nové problémy.
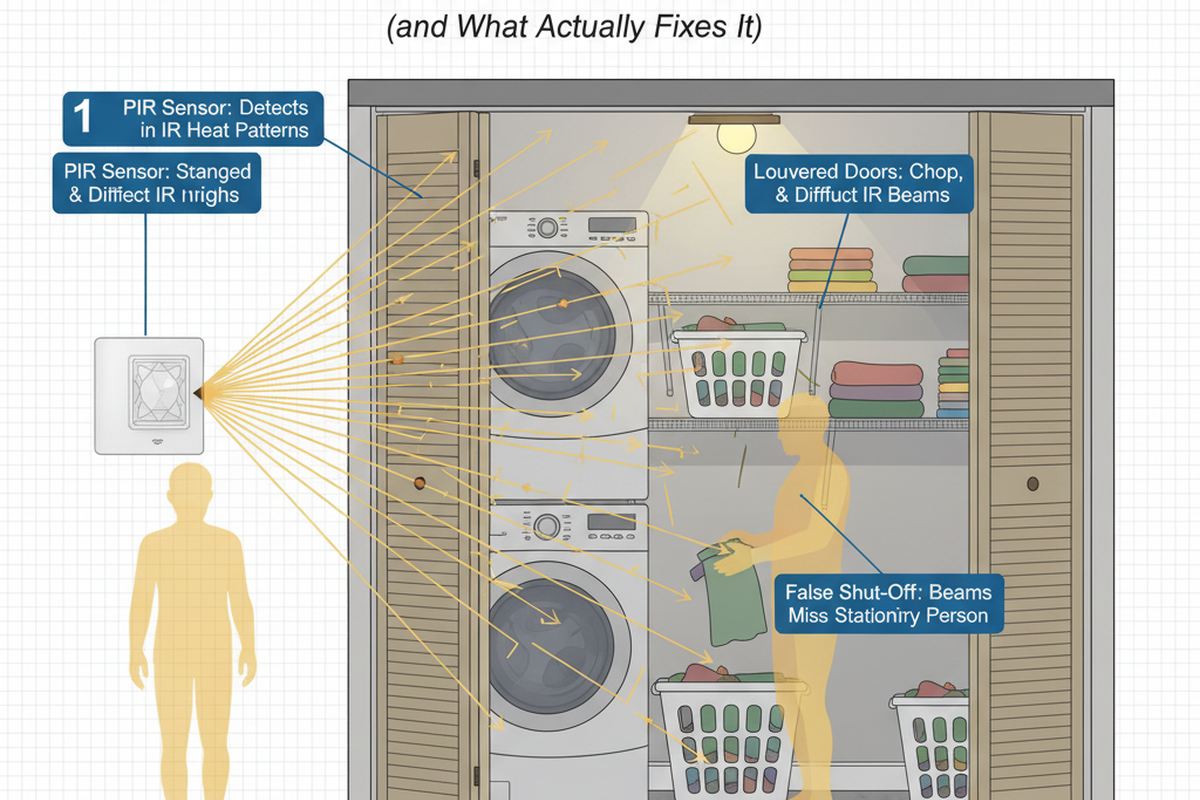
Falešné spouštění kvůli provozu na průchodech
Nastavení s vysokou citlivostí činí senzory, zejména pasivní infračervené (PIR), velmi náchylné k detekci pohybu mimo jejich určenou zónu. Ve skladu s osobními úložnými prostory to znamená, že někdo kráčí hlavní chodbou, může spustit světla ve křižovatce, kam nemá v úmyslu vstoupit. Toto aktivování přes průchodovou zónu plýtvá energií a vytváří rušivý "světelný show" efekt, kdy se prázdné chodby neustále zapínají a vypínají. Systém se stává hlučným a neefektivním, řeší jeden problém a vytváří druhý.
Snižující se návratnost vysoké citlivosti
Nad určitým bodem zvýšení citlivosti nepřináší žádný užitek při včasné detekci na dlouhé, úzké cestě. Schopnost senzoru detekovat pohyb závisí na jeho optickém designu a povaze pohybu. Pohyb přímo směrem k PIR senzoru nebo od něj je inherentně obtížnější detekovat než pohyb přes jeho zorné pole. Zvýšení citlivosti na to nemění základní omezení; jen zlepšuje rozpoznávání malých, tangenciálních pohybů – často právě zdroje falešných spouštění. Hlavní problém detekce pohybu vpřed na vzdálenost zůstává nevyřešen.
Základní princip: od reakce k předvídání
Pokud zvýšení citlivosti není řešením, co je? Řešení vyžaduje posun v myšlení: místo pokusu zpřesnit reaktivní systém je cílem navrhnout anticipační systém, který využívá geometrii a logiku k předpovědi cesty uživatele. Osvětlení by nemělo být reakcí na to, kde se člověk nachází, ale přípravou na to, kam jde. Toho je dosaženo třemi koordinovanými principy: rozestupem, zaměřením a časovou logikou.
První pilíř: geometrické rozestupy a rozložení senzorů ve střídavých pozicích
Jeden senzor, bez ohledu na jeho výkon, je jediným bodem selhání s omezenou detekční zónou. Klíčem k efektivnímu pokrytí chodby je použití více senzorů v uspořádání, které vytváří kontinuální, překrývající se pole záběru. Nejefektivnější geometrií pro to je střídavé uspořádání. Místo umístění senzorů v přímé řadě po středu chodby jsou střídavě rozmístěny z jedné strany chodby na druhou.
Možná máte zájem o

- Obsazení (Auto-ZAP/Auto-VYP)
- 12–24V DC (10–30VDC), až 10A
- Pokrytí 360°, průměr 8–12 m
- Zpoždění 15 s–30 min
- Světelný senzor Vyp./15/25/35 Lux
- Vysoká/Nízká citlivost
- Režim automatického zapnutí/vypnutí obsazenosti
- 100–265V AC, 10A (neutral je nutný)
- Pokrytí 360°; detekční průměr 8–12 m
- Zpoždění času 15 s–30 min; Lux VYPNUTO/15/25/35; Citlivost Vysoká/Nízká
- Režim automatického zapnutí/vypnutí obsazenosti
- 100–265V AC, 5A (neutral je nutný)
- Pokrytí 360°; detekční průměr 8–12 m
- Zpoždění času 15 s–30 min; Lux VYPNUTO/15/25/35; Citlivost Vysoká/Nízká

- 100V-230VAC
- Přenosová vzdálenost: až 20m
- Bezdrátový pohybový senzor
- Řízení přes kabel

- Napětí: 2x AAA baterie / 5V DC (Micro USB)
- Denní/noční režim
- Časové zpoždění: 15min, 30min, 1h (výchozí), 2h

- Napájecí adaptér se zástrčkou EU

- UK napájecí adaptér
- US napájecí adaptér

- 5V stejnosměrné napětí
- Přenosová vzdálenost: až 30 m
- Režim Den/Noc

- 5V stejnosměrné napětí
- Přenosová vzdálenost: až 30 m
- Režim Den/Noc

- Napětí: 2 x AAA
- Přenosová vzdálenost: 30 m
- Časové zpoždění: 5s, 1m, 5m, 10m, 30m

- Zátěžový proud: max. 10 A
- Automatický režim/režim spánku
- Časové zpoždění: 90s, 5min, 10min, 30min, 60min

- Zátěžový proud: max. 10 A
- Automatický režim/režim spánku
- Časové zpoždění: 90s, 5min, 10min, 30min, 60min

- Zátěžový proud: max. 10 A
- Automatický režim/režim spánku
- Časové zpoždění: 90s, 5min, 10min, 30min, 60min

- Zátěžový proud: max. 10 A
- Automatický režim/režim spánku
- Časové zpoždění: 90s, 5min, 10min, 30min, 60min

- Zátěžový proud: max. 10 A
- Automatický režim/režim spánku
- Časové zpoždění: 90s, 5min, 10min, 30min, 60min

- Zátěžový proud: max. 10 A
- Automatický režim/režim spánku
- Časové zpoždění: 90s, 5min, 10min, 30min, 60min

- Režim obsazenosti
- 100 V ~ 265 V, 5A
- Požadovaný neutrální vodič
- 1600 čtverečních stop
- Napětí: DC 12v/24v
- Režim: Automatický/zapnutý/vypnutý
- Časové zpoždění: 15s~900s
- Stmívání: 20%~100%

- Obsazenost, volno, režim zapnutí/vypnutí
- 100~265V, 5A
- Požadovaný neutrální vodič
- Vhodné pro čtvercovou zadní skříňku UK
Překrývající se pole eliminují mrtvé zóny

Rozložené uspořádání zajišťuje, že když se osoba pohybuje chodbou, nikdy není v slepé zóně detekce. Než opustí kužel detekce prvního senzoru, již vstupuje do kuželu druhého, který je umístěn na opačné stěně dále po cestě. Toto překryvné spojení je klíčové. Poskytuje systému nepřetržité informace o sledování a umožňuje plynulý, předvídatelný přenos z jedné osvětlené zóny do druhé.
Hledáte řešení úspory energie aktivované pohybem?
Obraťte se na nás pro kompletní PIR senzory pohybu, produkty pro úsporu energie aktivované pohybem, spínače se senzorem pohybu a komerční řešení pro detekci přítomnosti/volnosti.
Volba správného senzoru pro lineární detekci
Účinnost tohoto uspořádání je zvýšena volbou senzoru. Zatímco standardní PIR senzory jsou běžné, systémy, které používají mikrovlnné nebo duální senzory, mohou nabídnout lepší výkon ve dlouhých chodbách. Mikrovlnné senzory jsou obzvláště schopné detekovat pohyb směrem k senzoru, kompenzující hlavní slabost PIR senzoru. V rozloženém uspořádání může mikrovlnný senzor namířený dolů chodbou detekovat přicházející osobu mnohem dříve, což poskytuje klíčová data pro anticipační systém.
Pilíř 2: Strategické zaměřování pro předvídavou detekci
Samotné umístění nestačí; stejně důležitá je i orientace, kterou každý senzor míří. Častou chybou je montáž senzorů plošně na strop nebo stěnu, jejich směrování přímo dolů nebo napříč chodbou. Taková orientace minimalizuje jejich schopnost detekovat pohyb na vzdálenost.
Role senzoru a tvar paprsku
Každý pohybový senzor má čočku, která tvaruje jeho detekční oblast do specifického trojrozměrného vzoru. Porozumění tomuto tvaru je klíčové pro strategické zaměřování. Dlouhý dosah například vytváří úzký, protáhlý paprsek určený přímo pro chodby. Kombinace správné čočky se správným umístěním násobí účinnost systému. Cílem je vyslat detekční paprsek co nejdále po cestě uživatele.
Zaměřování před cestou

Pro dosažení proaktivní detekce by měly být senzory v rozloženém uspořádání mírně nakloněny dopředu, směřující dolů po chodbě ve směru jízdy. Senzor na levé stěně by měl být namířen směrem k pravé straně chodby dále po cestě, a naopak. Tato orientace, která hledí dopředu, vrhne detekční kužel senzoru daleko před uživatele, čímž detekuje jejich příchod dávno před tím, než dorazí do této zóny. Systém už tak nesleduje jen to, co je přímo pod ním; dívá se dopředu na to, co přichází.
Pilíř 3: Časová logika a předběžné blokovací bufferové paměti
Poslední pilíř využívá systémovou inteligenci ke spojení geometrických a zaměřovacích strategií. I s dokonalým umístěním senzoru existuje malá, ale pociťovatelná prodleva mezi detekcí pohybu a aktivací světla. Skutečný bezšroubový systém tento zpoždění odstraňuje pomocí předběžných blokovacích bufferů. Když senzor detekuje pohyb v Zóně A, řídicí systém nesystem pouze aktivuje světla v Zóně A; posílá také příkaz „předběžného spouštění“ do světel v příští logické zóně, Zóně B.
Toto předběžné spouštění může fungovat dvěma způsoby. Systém může aktivovat světla Zóny B současně se Zónou A, čímž zajišťuje, že celá cesta vpředu je okamžitě osvětlena. Nebo může zavést subsekundovou prodlevu, zapnout světla Zóny B těsně před tím, než uživatel vstoupí, čímž vytvoří dynamickou „vlnu“ světla, která se pohybuje s nimi. Tato časová logika povyšuje systém z řady nezávislých senzorů na jeden koherentní celek.
Inspirujte se portfoliem pohybových senzorů Rayzeek.
Nenašli jste to, co jste chtěli? Nebojte se. Vždy existují alternativní způsoby řešení vašich problémů. Možná vám pomůže některé z našich portfolií.
Kompletní systém: navrhování plynulého zážitku s osvětlením
Když jsou spojeny tyto tři pilíře — rozestupy s krokem, směřování vpřed a časové bufferové zóny — problém „honění světla“ mizí. Osvětlení chodbového systému se stává aktivním spoluúčastníkem v navigaci uživatele.
Procházka ideální cestou uživatele

Ve správně navrženém systému je zákazník vstupující do chodby detekován prvním senzorem směřovaným vpřed. Okamžitě se aktivují světla v jeho aktuální zóně a v následující před ním. Jak kráčí vpřed, prochází prostoru, který je stále osvětlován. Překrývající se, rozestupové senzory sledují jeho pokrok a logika systému nadále aktivuje další zónu v sekvenci před jeho příchodem. Světla za ním se vypínají po nastavené prodlevě, což šetří energii. Zážitek je plynulý, bezpečný a bez námahy působí dojmem inteligence.
Přizpůsobení principů pro rohy a niky
Tyto principy jsou přizpůsobitelné. Pro roh o 90 stupních by měl být senzor umístěn těsně před zatáčkou, zaměřen na detekci blížícího se člověka. Hlavní úlohou tohoto senzoru je předem spustit osvětlení kolem zatáčky, čímž se osvětluje nová cesta dříve, než ji uživatel vůbec uvidí. U nik a dveří je často dostačující širší záběr hlavních senzory chodeb. Klíčem je analyzovat pravděpodobnou trasu pohybu a umístit senzory na rozhodovacích bodech, aby vždy osvětlovaly cestu vpřed.