Det er en velkendt oplevelse i selvlagringsfaciliteter og bygninger med lange, ensartede gange. En kunde skubber en vogn ind i en mørk korridor, og lysene tænder et øjeblik for sent, enten direkte overhovedet eller, værre, lige bag dem. De er tvunget til konstant at skubbe fremad i mørket, hvilket skaber en konstant følelse af at ligge et skridt bagefter. Det er en lille designfejl, der skaber en betydelig følelse af ubehag og billighed. Løsningen er ikke at gøre eksisterende systemer mere følsomme, men at gøre dem mere intelligente.
Dette problem med “lysforsinkelse” kan løses permanent med en systematisk tilgang, der forvandler en bygnings belysning fra et reaktivt system til et forventende system. Ved omhyggeligt at planlægge sensorns placering, sigtning og timing kan du skabe en problemfri oplevelse, hvor vejen altid er godt oplyst, før en person ankommer, og leder dem fremad som om ved en usynlig hånd. Denne metode sikrer, at kunder aldrig igen skal skubbe vognen ind i mørket.
Det fælles korridorproblem: Jagten på lyset
I et standard bevægelsesaktiveret system styrer en enkelt sensor en dedikeret zone af lys. Når en person træder ind i denne zone, registrerer sensoren bevægelse og tænder for lysarmaturerne. I en lang korridor skaber dette en brudt oplevelse af at flytte fra en lysplet til den næste. Systemet reagerer altid på tilstedeværelse, ikke på hensigt. Som følge heraf er brugeren konstant på kanten af detekteringszonen, hvilket udløser lyset netop, når de ankommer, og tvinger dem til at “jage lyset” ned ad gangen — en konstant påmindelse om, at systemet halter bagefter.
Fælder for følsomhed: Hvorfor at skrue op for dialen skaber flere problemer
Den mest almindelige reaktion på lysforsinkelse er at øge følsomheden af bevægelsessensorerne. Logikken virker fornuftig: en mere følsom sensor bør registrere bevægelse længere væk og tænde lyset tidligere. I praksis resulterer denne tilgang ofte i modvind og introducerer nye problemer.
Falske udløsninger fra krydsende trafik i korridoren
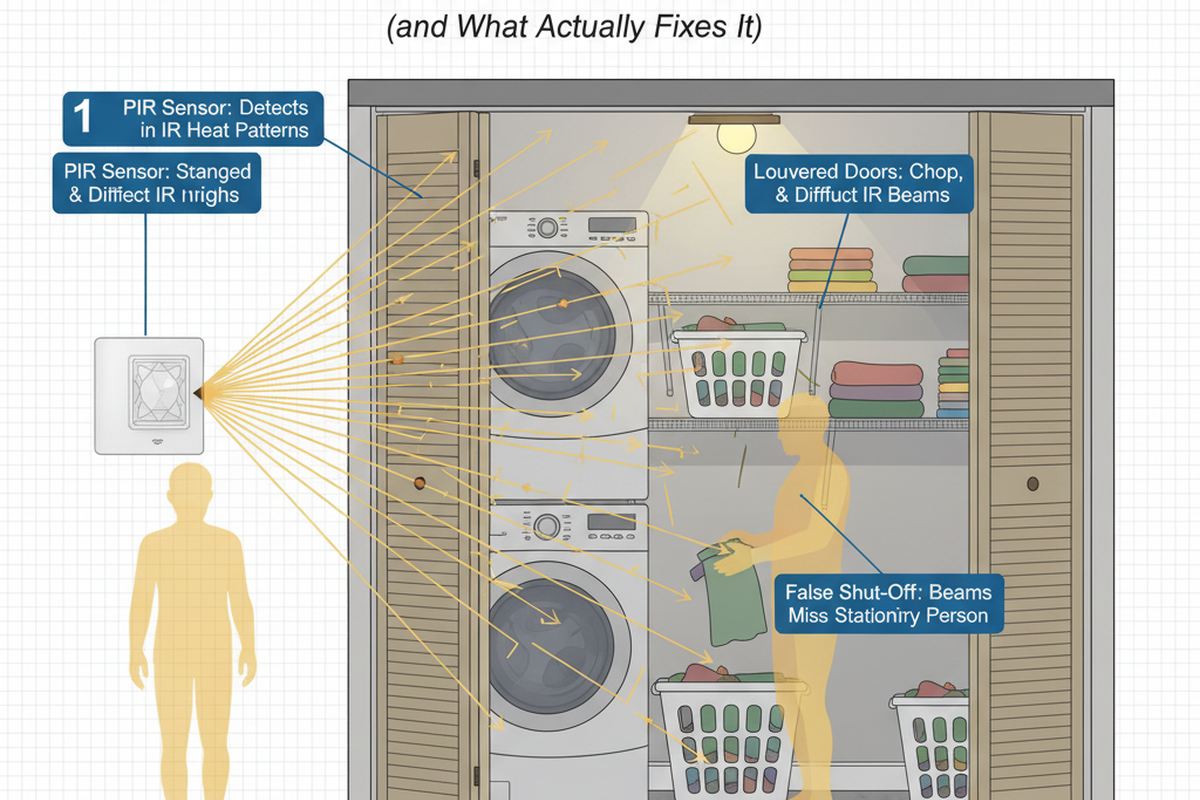
Indstillinger med høj følsomhed får sensorer, især passive infrarøde (PIR) typer, til at være meget følsomme over for bevægelse uden for deres tiltænkte zone. I en selvlagringsfacilitet betyder det, at nogen, der går ned ad en hovedgade, kan udløse lys i en krydsende gang, som de ikke har til hensigt at gå ind i. Denne krydsende aktivering spilder energi og skaber en distraherende “lysshow”-effekt, hvor tomme gange konstant tændes og slukkes. Systemet bliver støjende og ineffektivt, idet det løser ét problem ved at skabe et andet.
Det aftagende afkast af høj følsomhed
Over et vist punkt giver øget følsomhed ingen fordel for tidlig opdagelse langs en lang, smal sti. En sensors evne til at registrere bevægelse afhænger af dens linse-design og bevægelsens karakter. Bevægelse direkte mod eller væk fra en PIR-sensor er i sig selv sværere at opdage end bevægelse, der krydser dens synsfelt. At skrue op for følsomheden ændrer ikke denne grundlæggende begrænsning; det gør kun sensoren bedre til at opfatte små, tangentiale bevægelser — ofte den helt nye årsag til falske udløsninger. Kerneproblemet med at opdage fremadrettet bevægelse på afstand forbliver uløst.
Det grundlæggende princip: Fra reaktion til forventning
Hvis det ikke er at øge følsomheden, der er svaret, hvad er det så? Løsningen kræver et skift i tankegang: I stedet for at forsøge at gøre et reaktivt system hurtigere, er målet at designe et forventende system, der bruger geometri og logik til at forudsige en brugers vej. Belysningen bør ikke være en reaktion på, hvor personen er, men en forberedelse på, hvor de er på vej hen. Dette opnås gennem tre koordinerede principper: afstand, sigtning og tidsmæssig logik.
Pille 1: Geometrisk afstand og den staggede sensors layout
En enkelt sensor, uanset hvor kraftfuld den er, er et enkelt fejlpunkt med et begrænset detektionsområde. Nøglen til effektiv korridorkoverage er brugen af flere sensorer i en ordning, der skaber kontinuerlige, overlappende synsfelter. Den mest effektive geometri for dette er et staggede layout. I stedet for at placere sensorer i en lige linje ned gennem midten af gangen, veksles der mellem den ene side og den anden af gangen.
Måske er du interesseret i

- Tilstedeværelse (Auto-ON/Auto-AF)
- 12–24V DC (10–30VDC), op til 10A
- 360° dækning, 8–12 m diameter
- Tidsforsinkelse 15 s–30 min
- Lyssensor Tænd/15/25/35 Lux
- Høj/Ned sensibilitet
- Auto-ON/Auto-OFF tilstedeværelsestilstand
- 100–265V AC, 10A (har neutral)
- 360° dækkeevne; 8–12 m detekteringsdiameter
- Tidsforsinkelse 15 s–30 min; Lux FRA/15/25/35; Følsomhed Høj/Ned
- Auto-ON/Auto-OFF tilstedeværelsestilstand
- 100–265V AC, 5A (neutral nødvendig)
- 360° dækkeevne; 8–12 m detekteringsdiameter
- Tidsforsinkelse 15 s–30 min; Lux FRA/15/25/35; Følsomhed Høj/Ned

- 100V-230VAC
- Overførelsesafstand: op til 20m
- Trådløst bevægelsessensor
- Hardwired kontrol

- Spænding: 2x AAA Batterier / 5V DC (Micro USB)
- Dag/Nat Tilstand
- Tidsforsinkelse: 15min, 30min, 1h(standard), 2h

- EU-stik strømadapter

- UK-stik strømadapter
- US-stik strømadapter

- 5V DC
- Transmissionsafstand: op til 30 m
- Dag/nat-tilstand

- 5V DC
- Transmissionsafstand: op til 30 m
- Dag/nat-tilstand

- Spænding: 2 x AAA
- Transmissionsafstand: 30 m
- Tidsforsinkelse: 5s, 1m, 5m, 10m, 30m

- Belastningsstrøm: 10A Max
- Auto/Sleep-tilstand
- Tidsforsinkelse: 90s, 5min, 10min, 30min, 60min

- Belastningsstrøm: 10A Max
- Auto/Sleep-tilstand
- Tidsforsinkelse: 90s, 5min, 10min, 30min, 60min

- Belastningsstrøm: 10A Max
- Auto/Sleep-tilstand
- Tidsforsinkelse: 90s, 5min, 10min, 30min, 60min

- Belastningsstrøm: 10A Max
- Auto/Sleep-tilstand
- Tidsforsinkelse: 90s, 5min, 10min, 30min, 60min

- Belastningsstrøm: 10A Max
- Auto/Sleep-tilstand
- Tidsforsinkelse: 90s, 5min, 10min, 30min, 60min

- Belastningsstrøm: 10A Max
- Auto/Sleep-tilstand
- Tidsforsinkelse: 90s, 5min, 10min, 30min, 60min

- Tilstedeværelsestilstand
- 100V ~ 265V, 5A
- Neutral ledning påkrævet
- 1600 sq ft
- Spænding: DC 12v/24v
- Tilstand: Auto/ON/OFF
- Tidsforsinkelse: 15s~900s
- Dæmpning: 20%~100%

- Tilstedeværelse, Fravær, ON/OFF tilstand
- 100~265V, 5A
- Neutral ledning påkrævet
- Passer til UK firkantet bagdåse
Overlappende felter eliminerer døde zoner

Et forskudt layout sikrer, at når en person bevæger sig ned ad korridoren, er de aldrig i en blind vinkel for detection. Før de forlader den første sensors detekteringskegle, er de allerede begyndt at gå ind i den anden, som er placeret på den modsatte væg længere nede ad stien. Dette overlap er kritisk. Det giver systemet kontinuerlig sporingsinformation og muliggør en glidende, forudsigende overførsel fra én lyszone til den næste.
Leder du efter bevægelsesaktiverede energibesparende løsninger?
Kontakt os for komplette PIR-bevægelsessensorer, bevægelsesaktiverede energibesparende produkter, bevægelsessensorafbrydere og kommercielle løsninger til tilstedeværelse/fravær.
Valg af den rigtige sensor til lineær detektion
Effektiviteten af dette layout forbedres af valget af sensor. Mens standard PIR-sensorer er almindelige, kan systemer, der inkorporerer mikrobølge- eller dual-teknologisensorer, tilbyde overlegen ydeevne i lange korridorer. Mikrobølgesensorer er især dygtige til at opdage bevægelse mod sensoren, hvilket kompenserer for en PIR-sensors primære svaghed. I et forskudt layout kan en mikrobølgesensor rettet ned ad korridoren opdage en approaching person meget tidligere, hvilket giver de vigtige data til et forudseende system.
Pille 2: Strategisk sigtning for fremtidsorienteret detektion
Placering alene er ikke nok; den retning, hver sensor er rettet mod, er lige så kritisk. Den almindelige fejl er at montere sensorer fladt mod loftet eller væggen, pegende lige ned eller direkte across korridoren. Denne orientering minimerer deres evne til at opdage bevægelse på afstand.
Sensorlinse og båndformens rolle
Hver bevægelsessensor har en linse, der former dens detektionsområde til et specifikt tredimensionelt mønster. At forstå denne form er essentielt for strategisk sigtning. En langdistance-linse skaber for eksempel en smal, forlænget bånd, der er designet specielt til korridorer. Kombinationen af den rigtige linse med den rigtige placering multiplicerer systemets effektivitet. Målet er at projicere detektionsbåndet så langt ned ad brugerens sti som muligt.
Sigtning foran stien

For at opnå proaktiv detektion bør sensorer i et forskudt layout vinkles let fremad, pegende ned ad korridoren i retning af rejsen. En sensor på venstre væg bør sigtes mod højre side af korridoren længere nede, og omvendt. Denne fremadrettede orientering kaster sensorens detekteringskegle langt foran brugeren, hvilket opdager deres tilnærmelse lang tid, før de ankommer i den zone. Systemet ser ikke længere blot, hvad der er direkte under det; det ser fremad mod, hvad der kommer.
Pille 3: Tidslogik og pre-trigger buffere
Den sidste pille bruger systemniveau intelligens til at forbinde de geometriske og sigtningsstrategier. Selv med perfekt sensorplacering eksisterer en lille, men mærkbar forsinkelse mellem bevægelsesdetektion og lysaktivering. Et ægte sømløst system eliminerer denne forsinkelse ved at bruge pre-trigger buffere. Når en sensor registrerer bevægelse i Zone A, aktiverer kontrolsystemet ikke bare lyset i Zone A; det sender også en “pre-trigger” kommando til lyset i den næste logiske zone, Zone B.
Denne pre-trigger kan fungere på to måder. Systemet kan aktivere Zone B’s lys samtidigt med Zone A’s, hvilket sikrer, at hele stien foran er øjeblikkeligt oplyst. Alternativt kan det indføre en sub-sekund buffer, hvor Zone B’s lys tændes lige før brugeren træder ind, og skaber en dynamisk “bølge” af lys, der bevæger sig med dem. Denne tidslogik løfter systemet fra en serie af uafhængige sensorer til et enkelt, sammenhængende netværk.
Bliv inspireret af Rayzeek bevægelsessensorporteføljer.
Finder du ikke det, du ønsker? Bare rolig. Der er altid alternative måder at løse dine problemer på. Måske kan en af vores porteføljer hjælpe.
Det komplette system: Design af en problemfri belysningsoplevelse
Når disse tre søjler—skiftende afstand, fremadvendt pejling og temporære buffere—kombineres, forsvinder ‘jagt efter lyset’-problemet. Koridorens belysningssystem bliver en aktiv deltager i at vejlede brugeren.
En gennemgang af den ideelle brugerrejse

I et ordentligt designet system opdages en kunde, der træder ind i korridoren, af den første fremadvendte sensor. Umiddelbart aktiveres lyset i deres nuværende zone og den næste foran. Efterhånden som de går fremad, bevæger de sig gennem et kontinuerligt belyst område. De overlappende, forskudte sensorer følger deres fremskridt, og systemets logik fortsætter med at aktivere næste zone i rækken langt foran deres ankomst. Lys bagved slukker efter en fastsat forsinkelse for at spare energi. Oplevelsen er glat, sikker og føles ubesværet intelligent.
Tilpasning af principperne til hjørner og alkover
Disse principper er tilpasningsdygtige. For et 90-graders hjørne bør en sensor placeres lige før svinget, rettet mod at opdage en person, der nærmer sig. Denne sensors primære opgave er at forud-aktivere lyset omkring svinget og oplyse den nye vej, inden brugeren ser den. For alkover eller døre er de brede synsfelter fra korridorsensorerne ofte tilstrækkelige. Nøglen er at analysere den sandsynlige rejsevej og placere sensorer ved beslutningspunkter for altid at lysne vejen fremad.