La promesse d'une maison intelligente meurt souvent vers deux heures du matin, lorsqu'un chat déclenche un capteur de mouvement et inonde le salon de lumière. Elle meurt lorsque le chien errant dans le hall active un interrupteur destiné uniquement aux personnes, ou lorsqu'un rideau bougeant avec la brise est pris pour une occupation. En quelques semaines, le propriétaire frustré a soit réduit la sensibilité du capteur jusqu'à ce qu'il manque de détecter des personnes réelles, soit désactivé complètement l'automatisation. L'efficacité prévue devient une nuisance, et le matériel coûteux reste inutilisé.
Ce n’est pas une défaillance de la technologie. C’est une erreur de configuration. La physique qui permet à un capteur de détecter le mouvement ne distingue pas inherently un Berger allemand d’un adulte humain. Mais les différences dans la façon dont ces deux sujets occupent l’espace, génèrent de la chaleur et se déplacent sont réelles et exploitables. Avec la bonne configuration, ces différences peuvent être transformées en une discrimination fiable.
La solution n’est pas un matériel plus sensible ou des caméras coûteuses équipées d’IA. C’est l’application disciplinée de trois stratégies mécaniques : façonner le champ de vision vertical du capteur, choisir délibérément une hauteur de montage, et régler les seuils de sensibilité. Utilisées ensemble, ces techniques réduisent considérablement les déclenchements par des animaux domestiques et des mouvements involontaires tout en conservant une détection humaine solide comme un roc. Le résultat est une automatisation qui fonctionne.
Le problème de l’abandon : quand les animaux domestiques brisent l’automatisation
Le cycle est déplorablement familier. Un nouveau capteur de mouvement est installé avec les réglages d’usine, souvent à une hauteur pratique plutôt qu’optimale. Pendant quelques jours, il fonctionne parfaitement. Les lumières s’allument quand quelqu’un entre dans une pièce. Le système semble intelligent.
Puis le chat commence sa patrouille nocturne. Le chien se déplace sans relâche d’un endroit à un autre. Le capteur se déclenche, les lumières s’allument, et le sommeil est perturbé. Au début, ce n’est qu’une nuisance. Mais avec des dizaines de déclenchements erronés par semaine, le problème devient systémique. Le propriétaire lutte en abaissant la sensibilité. Cela aide, un temps. Mais bientôt, le système commence à manquer une présence humaine réelle—une personne qui se déplace lentement, entre sous un angle étrange ou marche au bord de la zone de détection. L’automatisation devient peu fiable dans les deux sens.
Abandonner est la seule réponse rationnelle. La commodité promise est devenue une tâche d’entretien. Le matériel reste fixé au mur, inerte, tandis que le ménage revient à actionner les interrupteurs à la main. Ce résultat n’est pas rare ; c’est le mode de défaillance dominant pour le contrôle du mouvement dans les maisons avec des animaux. La perte n’est pas seulement le coût du matériel, mais aussi le gaspillage d’énergie continu que le système était censé éviter.
Comment les capteurs de mouvement détectent quoi que ce soit

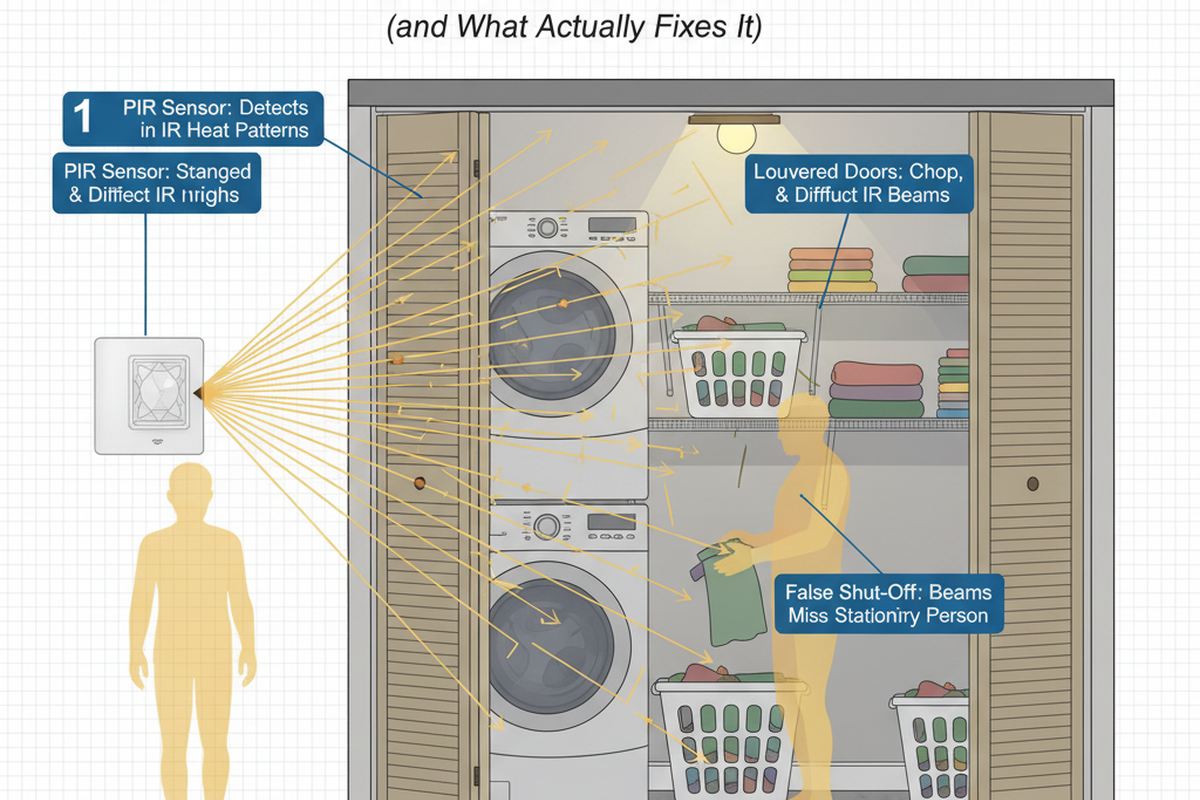
Les capteurs infrarouges passifs (PIR), véritables piliers de l'automatisation résidentielle, sont essentiellement des détecteurs de différence de chaleur. Tout objet plus chaud que zéro absolu émet de l'énergie infrarouge. Un capteur PIR utilise un élément pyroelectrique spécial, généralement divisé en deux zones ou plus, pour mesurer les variations dans ce champ infrarouge ambiant. Lorsqu'un corps chaud se déplace d'une zone à une autre, l'élément génère une petite différence de tension. Si ce signal dépasse un seuil prédéfini, le capteur signale une détection.
Vous recherchez des solutions d'économie d'énergie activées par le mouvement ?
Contactez-nous pour des détecteurs de mouvement PIR complets, des produits d'économie d'énergie activés par le mouvement, des interrupteurs à détecteur de mouvement et des solutions commerciales d'occupation/occupation.
Un capteur PIR ne « voit » pas au sens visuel. Il enregistre le mouvement thermique. C’est pourquoi il détecte aussi facilement un chat qu’une personne. Les deux sont des corps chauds qui créent un contraste de température avec un mur ou un sol plus frais. Lorsque le chat se déplace, il change de zone de détection du capteur, générant le même type de signal qu’un humain. Le signal d’une personne pourrait être plus fort, mais l’événement fondamental est identique. Le capteur n’a pas de concept inhérent de taille ou de hauteur. Il répond au changement.
Les capteurs micro-ondes utilisent un principe différent mais rencontrent le même problème. Ils émettent un signal radio continu à faible puissance et écoutent les décalages Doppler dans la réflexion. Tout objet se déplaçant vers ou éloignant le capteur modifiera la fréquence de la onde réfléchie. Un chien trottant dans la pièce crée un décalage Doppler aussi mesurable qu’une personne. Comme le PIR, le capteur micro-ondes ne sait que quelque chose bouge, pas ce qui bouge.
Par défaut, les deux types de capteurs sont conçus pour être inclusifs. Ils sont construits pour capturer tous les mouvements, ce qui est idéal pour un système de sécurité mais désastreux pour l’automatisation domestique qui doit répondre uniquement aux personnes. Sans contraintes spécifiques, le capteur signalera duty chaque animal, chaque rideau qui bouge, et même un gros insecte traversant directement sa lentille.
Les différences exploitables entre animaux et humains
Alors comment apprendre à un capteur simple à être plus intelligent ? Nous exploitons les différences physiques entre les personnes et les animaux.

La première et la plus fiable différence est la position verticale. Un adulte debout ou assis occupe une gamme de hauteur qu’un chat ou un petit chien ne peut tout simplement pas atteindre. Même un grand chien à quatre pattes conserve sa chaleur corporelle et sa masse nettement plus basse par rapport au sol qu’un torse humain. La majorité des mouvements humains se produisent à plus de trois pieds du sol ; la majorité des mouvements des animaux de compagnie se concentrent dans les deux pieds inférieurs. Cette séparation verticale est notre avantage principal.
La deuxième différence est la taille de la signature thermique. Un corps humain est une source infrarouge plus grande qu’un petit animal, répartie sur une zone verticale plus large. Cela signifie qu’une personne produira généralement un signal plus fort et plus soutenu. Toutefois, ce facteur est moins fiable que la hauteur, car la distance complique les choses. Un chat très proche du capteur peut produire un signal aussi fort qu’une personne plus éloignée. La taille est un filtre secondaire utile, mais elle ne peut pas être la seule.
La troisième différence, le motif de mouvement, est la plus faible de toutes. Les personnes et les animaux de compagnie bougent tous deux à des vitesses variables. Un personne marchant sur la pointe des pieds la nuit pourrait se déplacer aussi lentement qu’un chat en chasse. Un chien fonçant vers la porte se déplace plus vite qu’une personne marchant. Alors que certains systèmes avancés tentent d’analyser la démarche, ces méthodes sont trop fragiles pour la plupart des foyers. Pour nos besoins, le motif de mouvement n’est pas une variable fiable.
Modelage du champ de vision vertical : Zones aveugles techniques

La stratégie la plus efficace consiste à créer un point aveugle conçu. La mise en forme du champ de vision limite délibérément la zone de détection du capteur pour exclure la zone verticale où vivent et se déplacent les animaux de compagnie. Il s’agit d’une solution mécanique, et non d’un filtre logiciel.
Une lentille Fresnel d’un capteur PIR est segmentée pour concentrer l’énergie infrarouge provenant d’angles spécifiques sur l’élément sensible. En masquant physiquement des parties de cette lentille, ou en utilisant une lentille conçue avec des zones mortes intentionnelles, nous pouvons rendre le capteur aveugle à la partie inférieure de son champ de vision. La zone au niveau du sol est simplement retirée de la géométrie de détection.
Un capteur « immunisé contre les animaux de compagnie » correctement façonné possède une zone aveugle s’étendant du sol jusqu’à environ deux mètres et demi. Un chat marchant directement en dessous est invisible ; l’énergie infrarouge qu’il émet ne se concentre jamais sur les zones actives du capteur. Mais lorsqu’une personne entre dans le même espace, son torse et sa tête traversent les zones supérieures actives, et le capteur se déclenche instantanément. Ce n’est pas un jeu de probabilité ; c’est une certitude géométrique. Le capteur ne peut pas voir le sol, tout comme une caméra pointée vers le plafond ne peut pas.
Cette technique est remarquablement efficace, mais elle a ses limites. L’une d’elles concerne un très grand chien, dont la tête et les épaules pourraient tout juste dépasser le bord inférieur de la zone active. L’autre concerne un animal de compagnie grimpeur. Un chat qui saute sur un comptoir ou le dos d’un canapé se hisse dans le champ actif et déclenche le capteur. Ce ne sont pas des défauts de la méthode, mais une reconnaissance de ses limites.
Hauteur de montage comme base
Plus un capteur est monté haut, plus son angle de vue vers le bas devient raide. Cet angle prononcé comprime le champ de vision vertical, élevant efficacement la limite inférieure de détection. À six pieds, un capteur peut avoir une zone aveugle de deux pieds du sol. Montez ce même capteur à huit pieds, et la zone aveugle peut s’étendre à près de trois pieds. La hauteur est la base de l’immunité contre les animaux de compagnie.
C’est pourquoi les guides d’installation pour les capteurs immunisés contre les animaux de compagnie sont si précis concernant la hauteur de montage. Un capteur monté à la hauteur standard d’un interrupteur (environ quatre pieds) a un angle vers le bas peu prononcé et presque aucune zone aveugle au sol. Il verra tout. Le même capteur monté à sept ou huit pieds gagne une immunité significative car la signature thermique de l’animal, concentrée près du sol, n’intersecte jamais le cône de détection active du capteur.
Inspirez-vous des portefeuilles de détecteurs de mouvement Rayzeek.
Vous ne trouvez pas ce que vous voulez ? Ne vous inquiétez pas. Il existe toujours d'autres moyens de résoudre vos problèmes. L'un de nos portefeuilles peut peut-être vous aider.
Le compromis est une légère réduction de la couverture horizontale, car un capteur monté en hauteur crée une petite zone morte juste en dessous. Pour la plupart des pièces, cela ne pose pas de problème. Dans des espaces très grands, il peut être préférable d’utiliser deux capteurs stratégiquement placés plutôt qu’un seul à une hauteur compromise.
Si vous ne pouvez pas percer de trous, faites preuve de créativité. Utilisez une grande étagère, un poteau autoportant ou un support sur un meuble pour amener le capteur à l’altitude nécessaire. La méthode de montage est secondaire ; la hauteur est tout.
Niveaux de sensibilité : le dernier réglage
La sensibilité définit le niveau de signal minimal nécessaire pour déclencher une détection. Considérez-la comme un bouton de volume. Baisser la sensibilité augmente le seuil de signal requis, ce qui signifie qu'une source de chaleur plus grande ou plus proche est nécessaire pour déclencher un événement.
Après la mise en forme du champ de vision et la hauteur de montage qui ont accompli le gros du travail, le réglage de la sensibilité agit comme un filtre final. Il aide à gérer les cas exceptionnels, comme un grand chien dont l'épaule effleure simplement la zone active ou un chat qui grimpe occasionnellement sur une table basse. En réglant la sensibilité suffisamment haute pour détecter de manière fiable un humain, mais en dessous du seuil pour ces signaux mineurs de animaux de compagnie, vous gagnez une marge d'erreur supplémentaire.
Vous êtes peut-être intéressé par

- Ceiling-mounted PIR occupancy sensor with dry-contact relay output
- 12/24VDC or 12/24VAC low-voltage supply
- COM, NO, and NC isolated relay contacts for EMS, HVAC, and building control inputs

- Low-voltage DC recessed ceiling-mounted microwave motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- 10A max work current with adjustable time delay, Lux threshold, and sensitivity
- Higher-load recessed ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Recessed ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Ceiling-mounted RZ037 PIR occupancy sensor dimmer for 220V power
- 3A maximum working current with 660W rated load
- LUX button controls light-sensor ON/OFF and user-set dimming brightness
- Ceiling-mounted RZ037 PIR occupancy sensor dimmer for 110V power
- 3A maximum working current with 330W rated load
- LUX button controls light-sensor ON/OFF and user-set dimming brightness

- Low-voltage DC ceiling-mounted microwave motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- 10A max work current with adjustable time delay, Lux threshold, and sensitivity
- Higher-load ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
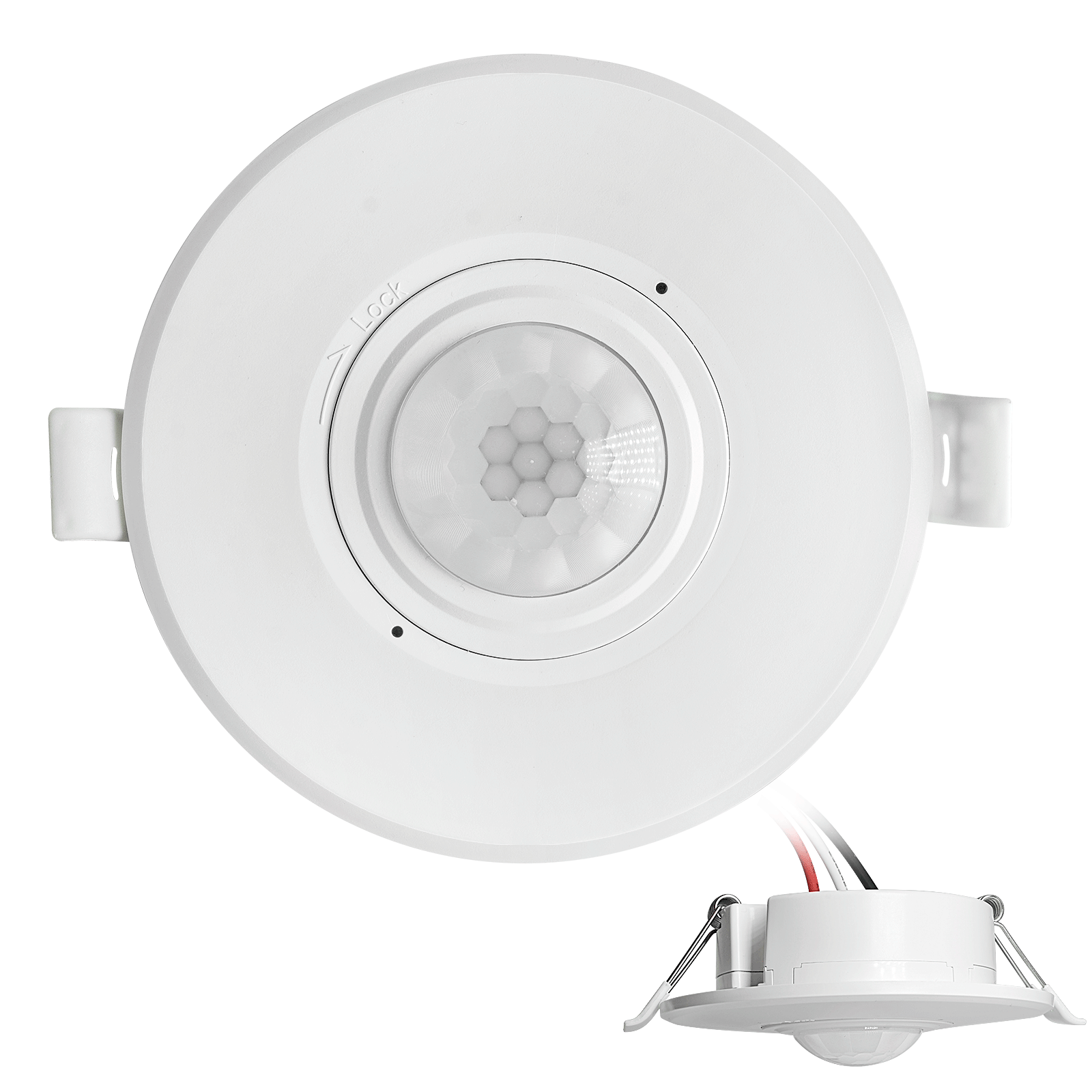
- Low-voltage DC recessed ceiling mount PIR motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- Max work current 10A with adjustable time delay, Lux threshold, and sensitivity
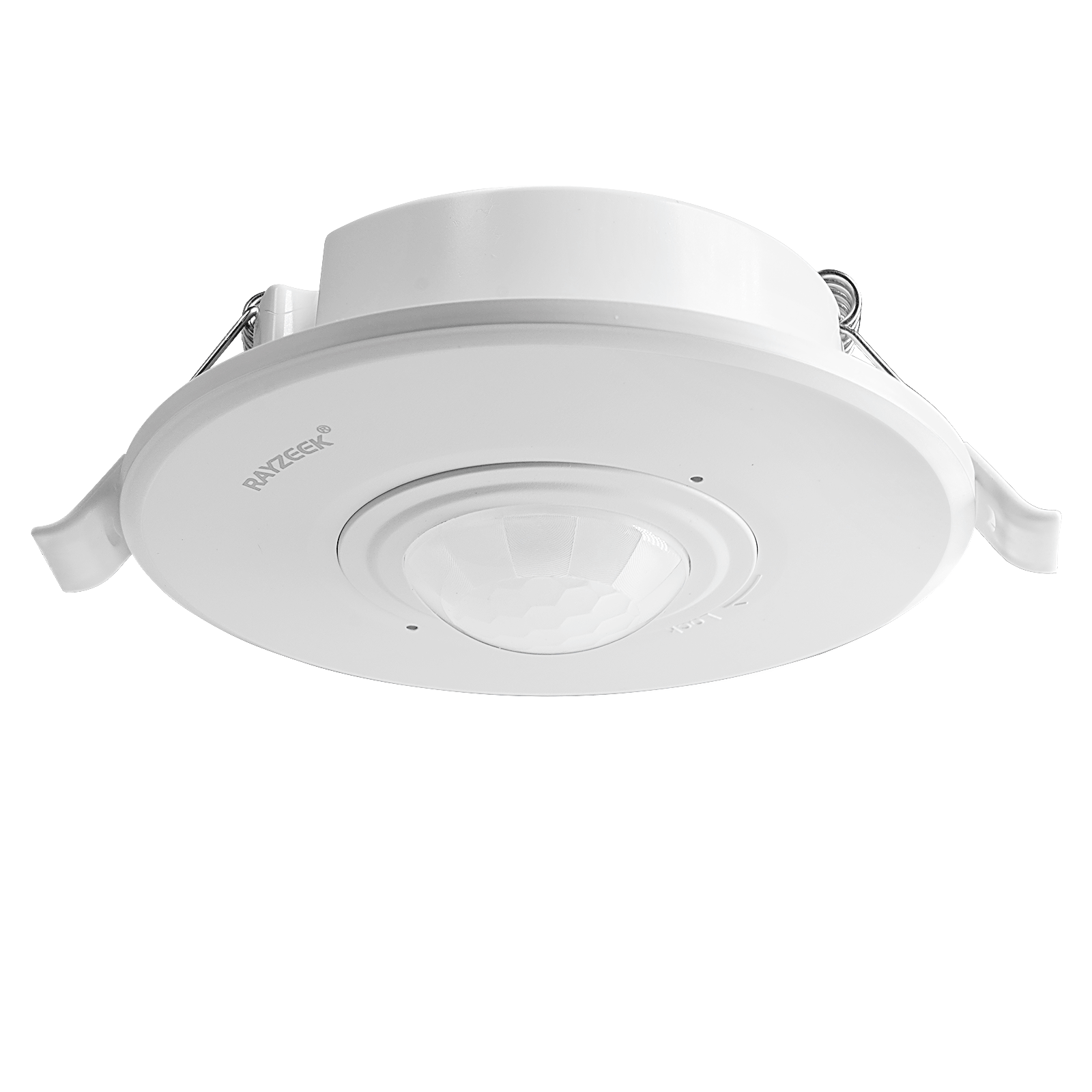
- Higher-load recessed ceiling mount PIR motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 360-degree detection with adjustable time delay, Lux threshold, and sensitivity
- Recessed ceiling mount PIR motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 360-degree detection with adjustable time delay, Lux threshold, and sensitivity
- Wireless switch and receiver kit for indoor ON/OFF lighting control
- 100-230VAC, 50/60Hz receiver with 5A rated current
- CR2032-powered wireless switch with 2.4GHz communication
- Présence (Auto-ON/Auto-OFF)
- 12–24V DC (10–30VDC), jusqu’à 10A
- Couverture à 360°, diamètre de 8–12 m
- Délai d’attente 15 s–30 min
- Capteur de lumière Désactivé/15/25/35 Lux
- Sensibilité Haute/Basse
- Mode d'occupation Auto-ON/Auto-OFF
- 100–265V AC, 10A (nécessite un neutre)
- Couverture à 360° ; diamètre de détection de 8 à 12 m
- Délai d'attente 15 s–30 min ; Lux ARRÊT/15/25/35 ; Sensibilité Haute/Basse
- Mode d'occupation Auto-ON/Auto-OFF
- 100–265V CA, 5A (neutre requis)
- Couverture à 360° ; diamètre de détection de 8 à 12 m
- Délai d'attente 15 s–30 min ; Lux ARRÊT/15/25/35 ; Sensibilité Haute/Basse

- 100V-230VAC
- Portée de transmission : jusqu’à 20m
- Capteur de mouvement sans fil
- Contrôle filaire

- Tension : 2 piles AAA/5 V CC (micro USB)
- Mode jour/nuit
- Délai de temporisation : 15min, 30min, 1h (par défaut), 2h

- Adaptateur secteur à prise européenne

- Adaptateur secteur à prise britannique
Trouver le bon réglage demande de l'itération, pas des calculs. La différence de force du signal entre une petite personne au bord de la pièce et un grand chien près du centre peut être mince. Réglez-la trop bas, et vous manquerez des gens. Réglez-la trop haut, et le chien la déclenchera. L'objectif est de trouver le point où la détection humaine est fiable et où les déclenchements liés aux animaux de compagnie sont réduits à une fréquence tolérable, proche de zéro. Certains capteurs avancés permettent même des niveaux de sensibilité différents pour le jour et la nuit, resserrant les règles lorsque les faux déclenchements sont les plus gênants.
Pourquoi le seul micro-ondes échoue dans les petites maisons
Les capteurs à micro-ondes sont parfois commercialisés comme une solution supérieure, capable théoriquement d'analyser la vitesse et la masse d’un objet à partir de sa signature Doppler. Dans un espace vaste, cela peut fonctionner. Dans une petite pièce meublée, la physique ne tient pas.
Le problème réside dans la réflexion multipath. Le signal du capteur ne voyage pas simplement vers la cible et revient ; il rebondit sur les murs, les meubles et les appareils électroménagers. Ces réflexions créent un environnement de signal bruyant et chaotique. Un petit chat en mouvement peut sembler beaucoup plus grand en raison d'une interférence constructive des réflexions, tandis qu'une personne peut sembler plus petite en raison d'une interférence destructive. La capacité du capteur à faire la différence en fonction de la taille devient alors totalement peu fiable. Dans une cuisine ou une chambre typique, un capteur à micro-ondes seul génère souvent plus de faux déclenchements liés aux animaux qu’un PIR mal configuré.
Les capteurs à double technologie, qui combinent PIR et micro-ondes et nécessitent que les deux données concordent avant de déclencher, sont une approche bien meilleure. Le PIR offre une discrimination géométrique robuste grâce à la mise en forme en hauteur et au champ de vision. La micro-ondes ajoute une confirmation secondaire du mouvement. Un chat au sol pourrait tromper le capteur à micro-ondes par des réflexions déformées, mais il sera invisible pour la zone masquée du PIR. Comme les deux ne déclenchent pas, l'alarme est suppressée, ce qui filtre la grande majorité des faux positifs.
Configuration de test avec chemins intentionnels
Un capteur configuré est une hypothèse non testée. Pour la valider, vous avez besoin d'une procédure structurée.
La procédure de test est simple :
- Parcourir la zone de couverture à un rythme normal depuis chaque entrée. Vérifiez que le capteur se déclenche de manière fiable.
- Testez les limites. Marchez lentement et aux extrémités de la pièce pour trouver les limites de la détection humaine.
- Laissez vos animaux se déplacer librement. Observez si leurs chemins habituels, en particulier directement sous le capteur, provoquent un déclenchement.
- Si possible, encouragez l'escalade. Faites monter le chat sur le canapé ou une étagère basse pour voir si cette action spécifique crée un faux positif.
- Ajustez et répétez. Si un grand chien déclenche encore le capteur, essayez de baisser la sensibilité d'un cran ou de relever la hauteur de montage de six pouces, puis refaites le test.
Ce test itératif en conditions réelles fournit des retours d'information bien plus précieux qu'une fiche technique. Rappelez-vous que l'objectif n'est pas seulement un système techniquement parfait, mais un système qui fonctionne sans stresser vos animaux. Une configuration qui marche mais rend le chien anxieux face aux lumières soudaines a échoué. La véritable marque de succès est un système si bien réglé que vos animaux même ne s’en rendent pas compte.