Czujnik ruchu umieszczony na równi z sufitem garażu o długości 16 stóp to recepta na frustrację. Światła pozostają wyłączone, podczas gdy ktoś pracuje w pobliżu perymetru. Pozostają ciemne, gdy osoba przechodzi przez halę. Dopiero gdy osoba zatrzymuje się bezpośrednio pod czujnikiem, zaczyna on migać, ożywając. To nie jest uszkodzony egzemplarz ani problem z czułością. To kwestia geometrii.
Przestrzenie wysokiego składowania, takie jak garaże, warsztaty czy magazyny, z sufitami od 12 do 25 stóp, ujawniają podstawową wadę, jaką mają działające czujniki ruchu. Ten sam stożek wykrywania, który z łatwością obejmuje podłogę na osiem stóp, staje się wąskim reflektorem na 20 stóp. Często odpowiedzią jest zwiększenie czułości, zakładając, że czujnik po prostu musi „pracować ciężej”. To nie tylko nie rozwiązuje problemu z zasięgiem, ale także powoduje kaskadę fałszywych alarmów z drzwi, systemów HVAC i nawet kołyszącego się sprzętu.
Prawdziwe rozwiązanie tkwi w zrozumieniu trójwymiarowej geometrii wykrywania. Chodzi o inteligentne umieszczenie, odpowiednią soczewkę i strefowanie wieloczujnikowe. Regulacja czułości ustawia próg detekcji, a nie obszar zasięgu. To właśnie strategia umieszczenia określa ten obszar.
Dlaczego czujniki ruchu zawodzą, gdy są zamontowane zbyt wysoko
Awaria w instalacjach wysokiego składowania jest przewidywalna. Osoba wchodzi wzdłuż ściany perymetralnej. Nic. Przesuwa się do stanowiska pracy 15 stóp dalej. Nadal nic. Przechodzi przez środek hali, i dopiero wtedy, po 20 lub 30 sekundach w ciemnościach, światła w końcu się włączają. Czujnik nie jest uszkodzony; działa dokładnie tak, jak nakazuje jego geometria wykrywania.
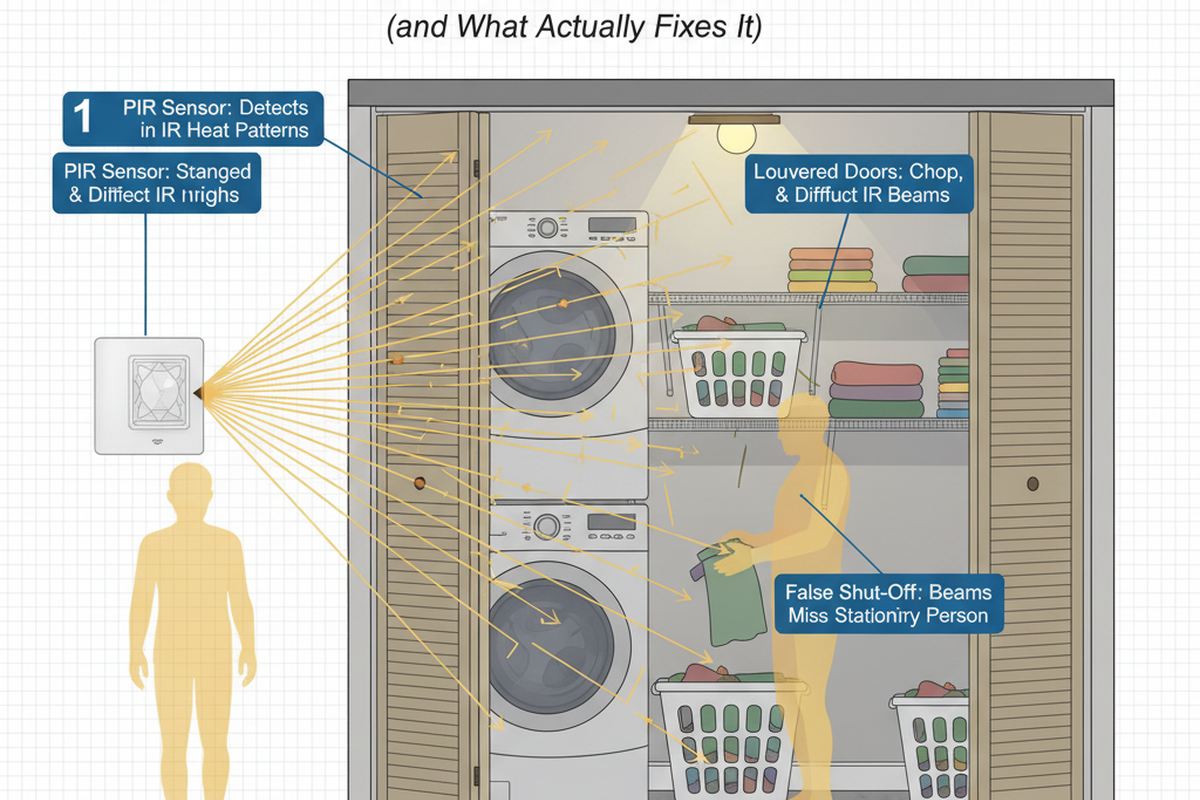
Czujniki pasywnej podczerwieni (PIR) wykrywają ruch, rozpoznając różnice temperatur przemieszczające się przez segmentowane strefy w ich polu widzenia. Soczewka dzieli to pole na wzór, a poruszanie się z jednej strefy do innej rejestruje się jako zdarzenie. Te strefy promieniują na zewnątrz od czujnika w stożek. Na standardowej wysokości mieszkalnej od siedmiu do dziewięciu stóp, ten stożek pokrywa podłogę typowego pokoju. Na 18 stóp, ten sam stożek kurczy się do małego śladu na podłodze, często do koła o średnicy zaledwie 8 do 12 stóp.
Większość czujników ruchu została zaprojektowana do montażu na wysokościach od siedmiu do dziesięciu stóp. Ich kąty soczewek i algorytmy wykrywania są zoptymalizowane dla tego zakresu. Czujnik z kątem wykrywania 90 stopni może obejmować koło o średnicy 20 stóp na wysokości ośmiu stóp, ale na 18 stopach zakres ten kurczy się do koła o średnicy 12 stóp. Całe perymetria przestrzeni — punkty wejścia, stanowiska pracy i magazyny — znajduje się całkowicie poza strefą wykrywania.
Zainspiruj się portfolio czujników ruchu Rayzeek.
Nie znalazłeś tego, czego szukasz? Nie martw się. Zawsze istnieją alternatywne sposoby rozwiązania problemów. Być może pomoże w tym jeden z naszych portfeli.

Ta ograniczenie geometryczne pogłębia kolejne ograniczenie: martwa strefa bezpośrednio pod czujnikiem. Na dużej wysokości montażu, ta martwa strefa proporcjonalnie się powiększa, jeszcze bardziej kurcząc skuteczną powierzchnię pokrycia.
Geometria wykrywania PIR: jak działają stożki zasięgu
Aby zrozumieć, dlaczego wysokość powoduje awarię, trzeba wyobrazić sobie, jak strefy wykrywania rzucają się w przestrzeń trójwymiarową. Soczewka na czujniku PIR nie jest prostym powiększalnikiem; to narzędzie optyczne, które wycina widok czujnika na wyraźne segmenty. Ruch rejestrowany jest tylko wtedy, gdy sygnatura cieplna przekracza z jednego segmentu do drugiego.
Kąt wykrywania i kurczenie się pola na podłodze
Czujnik z kątem wykrywania 90 stopni tworzy rozchodzącą się stożkową poświatę. Podczas gdy trygonometria sugeruje, że wyższa mocowania powinna tworzyć szerszy krąg na podłodze, praktyka wskazuje coś przeciwnego.
Gdy czujnik jest zamontowany na wysokości ośmiu stóp, jego stożek szybko przecina podłogę, tworząc szeroki, płytki obszar pokrycia. Na 18 stopach stożek dociera znacznie dalej, a jego skuteczne pole jest zajęte przez przestrzeń pionową, a nie rozprzestrzenianie się poziome. Obrys na podłodze staje się znacznie węższy. Ponadto zewnętrzne krawędzie stożka są tak ekstremalnie nachylone do podłogi, że tracą czułość. Osoba idąca na krawędzi stożka ledwo jest zauważalna, jeśli w ogóle.
Związek ten nie jest liniowy. Podwojenie wysokości mocowania nie zmniejsza po prostu zasięgu o połowę. Redukcja skutecznego pokrycia podłogi przyspiesza wraz z wysokością. Czujnik zamontowany na 20 stopach może zapewniać niezawodne pokrycie tylko nad kołem o średnicy 10 stóp, pozostawiając niewidzialną 80% część 30-stopowego kanału.
Strefa martwa poniżej
Każdy czujnik PIR ma minimalną odległość wykrywania, martwą strefę, w której nie może niezawodnie zobaczyć ruchu. Przy standardowej wysokości sufitu ośmiu stóp, może to być znikomy krąg o promieniu jednego metra na podłodze.
Przy wysokości sufitu 20 stóp, ta martwa strefa może się rozrastać do promienia sześciu lub ośmiu stóp. Ta martwa strefa, połączona z zawężonym zewnętrznym stożkiem, tworzy obszar wykrywania bardziej przypominający pączek niż pełny okrąg. Stanie w miejscu w dowolnym miejscu może nie wywołać reakcji czujnika, a przejście przez przestrzeń może tylko wywołać sporadyczne wykrycie. Dlatego samo dostosowanie czułości to walka na przegraną; czujnik nie zawodzi w widzeniu, lecz w... patrzeniu we właściwych miejscach.
Pułapka Czułości: Dlaczego Zwiększanie Ustawień Prowadzi do Odwrotnego Efektu
Gdy czujnik nie wykrywa ruchu, pierwszym impulsu jest maksymalne ustawienie czułości. Oparte jest to na błędnym założeniu, że czułość kontroluje obszar pokrycia. Nie jest to prawda.
Czułość reglamentuje próg wykrywania — minimalną zmianę temperatury wymaganą do zarejestrowania ruchu. Niska czułość wymaga silniejszego, wyraźniejszego sygnału. Wysoka czułość pozwala czujnikowi reagować na mniejsze różnice termiczne. Nie powiększa to stożka wykrywania ani nie zmienia jego geometrii; po prostu obniża próg tego, co kwalifikuje się jako ruch. w obrębie istniejącego stożka.
Jeśli osoba pracuje 20 stóp dalej, całkowicie poza stożkiem czujnika, żadna wartość czułości nie uczyni jej widzialną. Zamiast tego, wysoka czułość sprawia, że czujnik jest podatny na fałszywe wyzwalacze. Warsztaty to miejsca termicznie dynamiczne. Drzwi nad głową się otwierają, systemy HVAC się włączają, a urządzenia emitują ciepło. Narzędzia i kable wiszą na podmuchach powietrza. Przy ustawieniu progu czułości zbyt nisko, te nie-ludzkie zdarzenia zaczynają wyzwalać światła, które migają nieregularnie i marnują więcej energii niż ręczne włączanie.
Zmianą, której trzeba dokonać, jest miejsce montażu, a nie czułość. Czujnik musi być ustawiony tak, aby jego stożek wykrywania rzeczywiście przecinał obszary, gdzie pracują ludzie. To może oznaczać obniżenie wysokości mocowania, przesunięcie od sufitu na ścianę lub użycie wielu czujników.
Dobór odpowiedniej wysokości montażu w Twojej przestrzeni
Optymalna wysokość montażu czujnika w przestrzeni wysokobębnowej to balans między wysokością sufitu, wymiarami pomieszczenia, typem soczewki i przepływem pracy. Celem jest ustawienie czujnika na tyle nisko, aby objąć szeroki obszar podłogi, ale na tyle wysoko, aby uniknąć przeszkód.
Wysokość sufitu vs. pozycjonowanie czujnika
- 12 do 15 stóp: Montaż sufitowy może nadal działać tutaj, zwłaszcza z szerokokątnym obiektywem. Czujnik z kątem wykrywania 110 stopni zamontowany na 12 stóp może objąć koło o średnicy 18 do 22 stóp, co jest wystarczające dla wielu stanowisk na pojedynczy samochód.
- 16 do 20 stóp: Montaż sufitowy staje się marginalny. Czujnik na 18 stóp może pokrywać tylko koło o promieniu 12 stóp, co jest niewystarczające dla szerokiego na 24 stopy stanowiska. W takich przypadkach rozważ zamontowanie czujnika niżej na kolumnie lub belce albo użycie kilku czujników do nakładającej się ochrony.
- Powyżej 20 stóp: Standardowe czujniki montowane na suficie są zazwyczaj nieodpowiednie. Najlepszym rozwiązaniem jest montaż na ścianie na wysokości od ośmiu do 12 stóp, co pozwala czujnikowi patrzeć przez całą płaszczyznę podłogi, zamiast prosto w dół.
Aby oszacować zasięg, można użyć reguły kciuka. Oblicz teoretyczną średnicę na podstawie kąta wykrywania czujnika i wysokości, a następnie zmniejsz tę wartość o 25-30% %, aby uwzględnić ograniczenia rzeczywistego środowiska, takie jak strefa martwa i zmniejszona czułość na krawędziach.
Montaż na ścianie jako alternatywa

Montaż na ścianie oferuje zupełnie inną przewagę geometryczną. Zamiast rzutować stożek w dół, czujnik rzutuje go poziomo, wykrywając ruch, gdy osoba przechodzi przez jego pole widzenia. Ta orientacja wykorzystuje szerokość stożka do pokrycia podłogi, a nie powietrza.
Czujnik zamontowany na ścianie na wysokości 10 stóp, lekko pochylony w dół, może niezawodnie pokrywać zakres od 20 do 30 stóp. Kompromisem jest ukierunkowana predyspozycja; będzie lepiej wykrywał ruch w kierunku lub od niego niż równolegle. W długich, wąskich stanowiskach jest to często idealne. W większych przestrzeniach możesz potrzebować czujników na przeciwnych ścianach. Optymalna wysokość to zazwyczaj od 8 do 12 stóp — wystarczająco wysoko, aby ominąć przeszkody, ale na tyle nisko, aby utrzymać skuteczny kąt względem podłogi.
Może jesteś zainteresowany

- Obecność (Auto-WŁ/Auto-WY)
- 12–24V DC (10–30VDC), do 10A
- Zasięg 360°, średnica 8–12 m
- Opóźnienie czasowe 15 s–30 min
- Czujnik światła Wył/15/25/35 Lux
- Wysoka/Niska czułość
- Tryb zajętości Auto-ON/Auto-OFF
- 100–265V AC, 10A (neutralny wymaga się)
- Zasięg 360°; średnica wykrywania 8–12 m
- Opóźnienie czasowe 15 s–30 min; Lux OFF/15/25/35; czułość Wysoka/Niska
- Tryb zajętości Auto-ON/Auto-OFF
- 100–265V AC, 5A (wymagane neutralne)
- Zasięg 360°; średnica wykrywania 8–12 m
- Opóźnienie czasowe 15 s–30 min; Lux OFF/15/25/35; czułość Wysoka/Niska

- 100V-230V AC
- Dystans transmisji: do 20m
- Bezprzewodowy czujnik ruchu
- Sterowanie przewodowe

- Napięcie: 2x baterie AAA / 5V DC (Micro USB)
- Tryb dzienny/nocny
- Opóźnienie czasowe: 15min, 30min, 1h(domyślnie), 2h

- Zasilacz z wtyczką UE

- Zasilacz UK
- Zasilacz US

- 5V DC
- Odległość transmisji: do 30m
- Tryb dzień/noc

- 5V DC
- Odległość transmisji: do 30m
- Tryb dzień/noc

- Napięcie: 2 x AAA
- Odległość transmisji: 30 m
- Opóźnienie: 5s, 1m, 5m, 10m, 30m

- Prąd obciążenia: maks. 10 A
- Tryb automatyczny/uśpienia
- Opóźnienie czasowe: 90s, 5min, 10min, 30min, 60min

- Prąd obciążenia: maks. 10 A
- Tryb automatyczny/uśpienia
- Opóźnienie czasowe: 90s, 5min, 10min, 30min, 60min

- Prąd obciążenia: maks. 10 A
- Tryb automatyczny/uśpienia
- Opóźnienie czasowe: 90s, 5min, 10min, 30min, 60min

- Prąd obciążenia: maks. 10 A
- Tryb automatyczny/uśpienia
- Opóźnienie czasowe: 90s, 5min, 10min, 30min, 60min

- Prąd obciążenia: maks. 10 A
- Tryb automatyczny/uśpienia
- Opóźnienie czasowe: 90s, 5min, 10min, 30min, 60min

- Prąd obciążenia: maks. 10 A
- Tryb automatyczny/uśpienia
- Opóźnienie czasowe: 90s, 5min, 10min, 30min, 60min

- Tryb zajętości
- 100 V ~ 265 V, 5 A
- Wymagany przewód neutralny
- 1600 stóp kwadratowych
- Napięcie: DC 12v/24v
- Tryb: Auto/ON/OFF
- Opóźnienie czasowe: 15s~900s
- Ściemnianie: 20%~100%

- Tryb zajętości, pustostanu, ON/OFF
- 100~265V, 5A
- Wymagany przewód neutralny
- Pasuje do kwadratowej skrzynki tylnej UK
Strategia doboru obiektywu do wysokich przestrzeni
Obiektyw determinuje geometrię pokrycia czujnika. W zastosowaniach w wysokich magazynach jest to ważny wybór między szerokokątnymi a wąskokątnymi opcjami.
Obiektywy szerokokątne (110-180 stopni) są domyślnym wyborem dla montażu na suficie w umiarkowanie dużych stanowiskach, zaprojektowane do pokrycia szerokiego obszaru podłogi z jednego punktu. Ich wadą jest krótszy efektywny zasięg. Na większych wysokościach krawędzie stożka szerokokątnego stają się zbyt płytkie i tracą czułość.
Obiektywy wąskokątne (60-90 stopni) Skup się kono detekcji, aby uzyskać węższy, dłuższy wiązkę. Oślepka o kącie 60 stopni może wykrywać ruch z odległości 12 metrów lub więcej, co czyni ją idealną do długich, wąskich zatok lub zastosowań na ścianie. Jej kompromisem jest zmniejszona zakładka boczna, co tworzy martwe punkty w szerokim pomieszczeniu, chyba że użyje się wielu czujników.
Wybór zależy od kształtu pomieszczenia. Dla kwadratowych zatok z umiarkowanymi sufitami (3-5 metrów), szerokokątny obiektyw na suficie sprawdza się dobrze. Dla długich, wąskich zatok, wąskokątne obiektywy na ścianach końcowych zapewniają lepszą ochronę. Przy bardzo wysokich sufitach (ponad 5,5 metra) często najpewniejszym rozwiązaniem jest czujnik wąskokątny na ścianie.
Strefowanie czujników wielo-sensorycznych dla pełnej ochrony
Dla dużych lub złożonych przestrzeni pojedynczy czujnik zawsze będzie miał ograniczenia. Profesjonalne podejście to strefowanie wielo-sensoryczne, które korzysta z koordynowanego zestawu czujników, tworząc pełne, nakładające się pole ochronne.
Obliczanie nakładania się zasięgów

Zamiast próbować rozciągać zasięg jednego czujnika, rozmieścić dwa lub więcej z nakładającymi się strefami detekcji. To zapewnia płynne przejście, gdy osoba porusza się po przestrzeni. Standard branżowy zakłada 30-50% nakładanie się. Jeśli czujnik ma efektywny średnicę 6 metrów, kolejny czujnik powinien być umieszczony nie dalej niż 4 metry. To gwarantuje, że każdy punkt na podłodze jest pokryty przez co najmniej jeden czujnik, eliminując luki.
Rozwiązanie narożników i przeszkód
Nawet przy właściwym odstępie, narożniki i duże obiekty tworzą martwe strefy. Widok czujnika jest liniowy; nie widzi wokół kolumny podtrzymującej ani przez pojazd na podnośniku. Rozwiązaniem jest ukierunkowane uzupełniające pokrycie. Mały, specjalnie przeznaczony czujnik umieszczony w narożniku lub po przeciwnej stronie przeszkody może wyeliminować te strefy cienia bez zakłócania głównego układu.
Nawet przy odpowiednich odstępach narożniki i duże obiekty tworzą martwe strefy. Widok czujnika to linia prosta; nie widzi wokół słupa wsparcia ani przez pojazd na podnosiku. Rozwiązaniem jest ukierunkowane, uzupełniające pokrycie. Mały, dedykowany czujnik umieszczony w narożniku lub na drugiej stronie przeszkody może wyeliminować te cieńsze strefy bez zakłócania głównego układu.
Szukasz rozwiązań energooszczędnych aktywowanych ruchem?
Skontaktuj się z nami, aby uzyskać kompletne czujniki ruchu PIR, produkty energooszczędne aktywowane ruchem, przełączniki czujników ruchu i rozwiązania komercyjne w zakresie obecności/pobytu.
Ustawianie czujników, aby unikać fałszywych alarmów
Ostatnim krokiem jest ustawienie czujników tak, aby ignorowały normalną termiczną i mechaniczną aktywność warsztatu. Chodzi o umiejscowienie, a nie obniżanie czułości.
Termiczne zakłócenia: Ustaw czujniki tak, aby ich stożki nie przecinały strumienia powietrza z wymuszonych ogrzewaczy lub nawiewów HVAC. Trzymaj je pod kątem z dala od dużych nadziemnych drzwi, które powodują szybkie zmiany temperatury po ich otwarciu. Jeśli drzwi muszą znajdować się w obszarze wykrywania, krótki czas opóźnienia na wyjściu czujnika może wyeliminować zdarzenie przejściowe.
Poruszające się obiekty: Czujniki montowane tam, gdzie zwisające kable, węże lub narzędzia wiszące są statyczne względem pola widzenia czujnika. Czujnik zamontowany bezpośrednio nad wiszącym wężem powietrznym nie zauważy ruchu, nawet jeśli się on porusza.
Bezlituowe czujniki oferują znacznie więcej elastyczności przy tego rodzaju strategicznym umiejscowieniu, ponieważ nie są ograniczone przez istniejące kanały. Niezależnie od tego, czy są przewodowe, czy bezprzewodowe, strategia jest ta sama: wykorzystać umiejscowienie, kąt i typ soczewki, aby rozwiązać luki w detekcji i fałszywe wyzwalacze, pozostawiając ustawienie czułości na poziomie zalecanym przez producenta.