Um sensor de movimento montado embutido no teto de uma garagem de 16 pés é uma receita para frustração. As luzes permanecem apagadas enquanto alguém trabalha próximo ao perímetro. Elas permanecem escuras enquanto a pessoa atravessa a bay. Somente quando o indivíduo para bem abaixo do sensor ele finalmente se acende. Isto não é um defeito nem um problema de sensibilidade. É um problema de geometria.
Espaços de grande altura, como garagens, oficinas e depósitos, com tetos de 12 a 25 pés, revelam uma falha fundamental na forma como a maioria dos sensores de movimento funcionam. O mesmo cone de detecção que cobre facilmente um chão a oito pés torna-se um foco estreito a 20 pés. A resposta comum é aumentar a sensibilidade, assumindo que o sensor só precisa de “trabalhar mais”. Isso não só não resolve o problema de cobertura como também convida uma cascata de falsas ativações por portas, sistemas HVAC e até equipamentos oscilantes.
A solução real está em entender a geometria tridimensional da detecção. Trata-se de uma colocação inteligente, da lente certa e da zona de múltiplos sensores. O controle de sensibilidade define o limite de detecção, não a área de cobertura. Sua estratégia de posicionamento é o que realmente define essa área.
Por que os sensores de movimento falham quando instalados muito alto
A falha em instalações de alta elevação é previsível. Uma pessoa entra ao longo de uma parede de perímetro. Nada. Ela se move até uma bancada a 15 pés de distância. Ainda nada. Ela atravessa o centro da bay, e só então, depois de 20 ou 30 segundos no escuro, as luzes finalmente se acendem. O sensor não está quebrado; ele está operando exatamente como sua geometria de detecção dita.
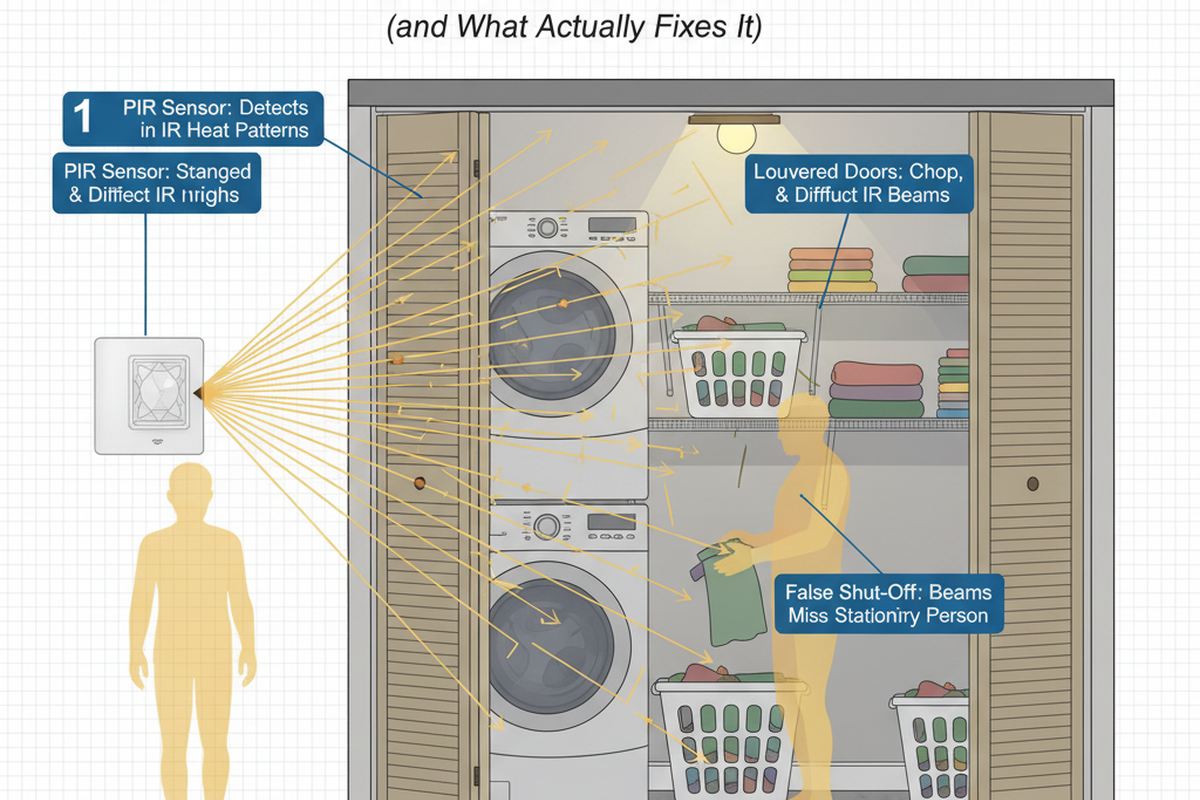
Sensores infravermelhos passivos (PIR) detectam movimento identificando diferenças de temperatura que se deslocam por zonas segmentadas em seu campo de visão. A lente divide esse campo em um padrão, e o movimento de uma zona para outra é registrado como um evento. Essas zonas se projetam para fora do sensor em um cone. A uma altura residencial padrão de sete a nove pés, esse cone cobre o piso de uma sala típica. A 18 pés, esse mesmo cone encolhe para uma pequena área no chão, muitas vezes um círculo de apenas oito a 12 pés de diâmetro.
A maioria dos sensores de movimento é projetada para alturas de montagem entre sete e dez pés. Seus ângulos de lente e algoritmos de detecção são otimizados para esse intervalo. Um sensor com um ângulo de detecção de 90 graus pode cobrir um círculo de 20 pés de diâmetro a oito pés, mas a 18 pés, essa cobertura encolhe para um círculo de 12 pés. Todo o perímetro do espaço—onde estão as entradas, bancadas e armazenamento—fica completamente fora da zona de detecção.
Inspire-se nos portfólios de sensores de movimento Rayzeek.
Não encontra o que pretende? Não se preocupe. Há sempre formas alternativas de resolver os seus problemas. Talvez um dos nossos portefólios possa ajudar.

Essa limitação geométrica é agravada por outra limitação: uma zona morta logo abaixo do sensor. Com alturas de montagem elevadas, esse ponto cego se expande proporcionalmente, encolhendo ainda mais a área de cobertura efetiva.
A Geometria da Detecção PIR: Como Funcionam os Cone de Cobertura
Para entender por que a altura causa falha, você precisa visualizar como as zonas de detecção se projetam em um espaço tridimensional. A lente de um sensor PIR não é um simples ampliador; é uma ferramenta óptica que recorta a visão do sensor em segmentos distintos. O movimento é registrado somente quando uma assinatura de calor cruza de um desses segmentos para outro.
Ângulo de Detecção e a Pegada do Piso que Encolhe
Um sensor com um ângulo de detecção de 90 graus cria um cone em expansão. Embora a trigonometria sugira que uma montagem mais alta crie um círculo mais amplo no chão, a prática prova o contrário.
Quando um sensor é montado a oito pés, seu cone intersecta o chão rapidamente, criando um padrão de cobertura amplo e superficial. A 18 pés, o cone percorre muito mais espaço, e seu campo efetivo é consumido pelo espaço vertical, não pela propagação horizontal. A pegada resultante no chão se torna muito mais estreita. Além disso, as bordas externas do cone projetam-se em um ângulo tão extremo em relação ao chão que perdem sensibilidade. Uma pessoa caminhando na borda do cone quase não é registrada, se é que é.
A relação não é linear. Dobrar a altura de montagem não reduz simplesmente pela metade a cobertura. A redução na cobertura de piso efetiva acelera com a altura. Um sensor montado a 20 pés pode fornecer cobertura confiável somente sobre um círculo de 10 pés de diâmetro logo abaixo dele, deixando invisível 80% de uma bay de 30 pés.
A Zona Morta Abaixo
Todo sensor PIR possui uma distância mínima de detecção, um ponto cego onde não consegue ver movimento de forma confiável. Em um teto com altura padrão de oito pés, isso pode ser um círculo de um pé de raio desprezível no chão.
Com uma altura de teto de 20 pés, essa zona morta pode se expandir para um raio de seis ou oito pés. Esse ponto cego, combinado com o cone externo estreito, cria uma área de detecção mais parecida com um donut do que com um círculo sólido. Ficar parado em qualquer lugar pode não ativar o sensor, e passar pelo espaço pode apenas produzir uma detecção intermitente. É por isso que simplesmente ajustar a sensibilidade é uma batalha perdedora; o sensor não está falhando ao ver, ele está falhando ao olhar nos lugares certos.
A Armadilha da Sensibilidade: Por que aumentar as configurações de forma agressiva dá errado
Quando um sensor não consegue detectar movimento, o primeiro impulso é aumentar ao máximo a sensibilidade. Isso baseia-se na ideia errônea de que a sensibilidade controla a área de cobertura. Não controla.
A sensibilidade ajusta o limiar de detecção—a mudança mínima de temperatura necessária para registrar como movimento. Baixa sensibilidade requer um sinal maior e mais claro. Alta sensibilidade permite que o sensor reaja a diferenças térmicas menores. Ela não amplia o cone de detecção ou muda sua geometria; apenas reduz o padrão para o que qualifica como movimento dentro desse cone existente.
Se uma pessoa estiver a 20 pés de distância, completamente fora do cone do sensor, nenhuma quantidade de sensibilidade a tornará visível. Em vez disso, alta sensibilidade torna o sensor vulnerável a acionamentos falsos. Oficinas são lugares termicamente dinâmicos. Portas overhead abrem, sistemas HVAC ligam, e equipamentos irradiam calor. Ferramentas e cabos pendurados balançam com as correntes de ar. Com o limite de sensibilidade ajustado muito baixo, esses eventos não humanos começam a acionar as luzes, que ligam e desligam de forma errática e desperdiçam mais energia do que um interruptor manual.
A variável a ajustar é a colocação, não a sensibilidade. O sensor deve ser posicionado de modo que seu cone de detecção realmente intersecte as áreas onde as pessoas trabalham. Isso pode significar diminuir a altura de montagem, mover de teto para parede, ou usar múltiplos sensores.
Determinar a Altura de Montagem Correta para o Seu Espaço
A altura de montagem ideal para um sensor em um espaço de alta estante é um equilíbrio entre a altura do teto, as dimensões do ambiente, o tipo de lente e o fluxo de trabalho. O objetivo é posicionar o sensor baixo o suficiente para uma ampla área no chão, mas alto o suficiente para evitar obstruções.
Altura do Teto vs. Posicionamento do Sensor
- 12 a 15 pés: A montagem no teto ainda pode funcionar aqui, especialmente com uma lente grande-angular. Um sensor com um ângulo de detecção de 110 graus montado a 12 pés pode cobrir um círculo de 18 a 22 pés de diâmetro, suficiente para muitas motocicletas de uma única garagem.
- 16 a 20 pés: A montagem no teto torna-se marginal. Um sensor a 18 pés pode cobrir apenas um círculo de 12 pés, o que é inadequado para uma garagem de 24 pés de largura. Nesses casos, considere montar o sensor mais baixo em uma coluna ou viga, ou use vários sensores para cobertura sobreposta.
- Mais de 20 pés: Sensores padrão de teto geralmente são inadequados. A melhor abordagem é montar na parede a uma altura entre oito e 12 pés, permitindo que o sensor olhe através do plano do chão em vez de direto para baixo.
Para estimar a cobertura, você pode usar uma regra de ouro. Calcule o diâmetro teórico com base no ângulo de detecção e na altura do sensor, depois reduza esse número em 25-30% para levar em conta limitações do mundo real, como a zona morta e a sensibilidade reduzida nas bordas.
Montagem na Parede como Alternativa

A montagem na parede oferece uma vantagem geométrica completamente diferente. Em vez de projetar um cone para baixo, o sensor o projeta horizontalmente, detectando movimento à medida que uma pessoa cruza seu campo de visão. Essa orientação usa a largura do cone para cobrir o chão, não o ar.
Um sensor montado na parede a dez pés, levemente inclinado para baixo, pode cobrir confiavelmente uma faixa de 20 a 30 pés. A troca é um viés direcional; ele será melhor ao detectar movimento em direção a ele ou se afastando, do que paralelo a ele. Em garagens longas e estreitas, isso costuma ser perfeito. Em espaços mais largos, pode ser necessário usar sensores nas paredes opostas. A altura ideal é geralmente entre oito e 12 pés—alto o suficiente para evitar obstáculos, mas baixo o bastante para manter um ângulo eficaz no chão.
Talvez esteja interessado em

- Ceiling-mounted PIR occupancy sensor with dry-contact relay output
- 12/24VDC or 12/24VAC low-voltage supply
- COM, NO, and NC isolated relay contacts for EMS, HVAC, and building control inputs

- Low-voltage DC recessed ceiling-mounted microwave motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- 10A max work current with adjustable time delay, Lux threshold, and sensitivity
- Higher-load recessed ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Recessed ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Ceiling-mounted RZ037 PIR occupancy sensor dimmer for 220V power
- 3A maximum working current with 660W rated load
- LUX button controls light-sensor ON/OFF and user-set dimming brightness
- Ceiling-mounted RZ037 PIR occupancy sensor dimmer for 110V power
- 3A maximum working current with 330W rated load
- LUX button controls light-sensor ON/OFF and user-set dimming brightness

- Low-voltage DC ceiling-mounted microwave motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- 10A max work current with adjustable time delay, Lux threshold, and sensitivity
- Higher-load ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Low-voltage DC recessed ceiling mount PIR motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- Max work current 10A with adjustable time delay, Lux threshold, and sensitivity
- Higher-load recessed ceiling mount PIR motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 360-degree detection with adjustable time delay, Lux threshold, and sensitivity
- Recessed ceiling mount PIR motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 360-degree detection with adjustable time delay, Lux threshold, and sensitivity
- Wireless switch and receiver kit for indoor ON/OFF lighting control
- 100-230VAC, 50/60Hz receiver with 5A rated current
- CR2032-powered wireless switch with 2.4GHz communication
- Presença (Auto-LIGAR/Auto-DESLIGAR)
- 12–24V DC (10–30VDC), até 10A
- Cobertura de 360°, diâmetro de 8–12 m
- Atraso de tempo 15 s–30 min
- Sensor de luz Desligado/15/25/35 Lux
- Alta/Baixa sensibilidade
- Modo de ocupação Auto-ON/Auto-OFF
- 100–265V CA, 10A (neutro necessário)
- Cobrimento de 360°; diâmetro de detecção de 8–12 m
- Atraso de tempo 15 s–30 min; Lux DESL/15/25/35; Sensibilidade Alta/Baixa
- Modo de ocupação Auto-ON/Auto-OFF
- 100–265V AC, 5A (necessário neutro)
- Cobrimento de 360°; diâmetro de detecção de 8–12 m
- Atraso de tempo 15 s–30 min; Lux DESL/15/25/35; Sensibilidade Alta/Baixa

- 100V-230VAC
- Distância de Transmissão: até 20m
- Sensor de movimento sem fio
- Controle com fiação

- Voltagem: 2x Pilhas AAA / 5V DC (Micro USB)
- Modo dia/noite
- Tempo de atraso: 15min, 30min, 1h (predefinição), 2h

- Adaptador de alimentação com ficha da UE

- Adaptador de alimentação com ficha do Reino Unido
Estratégia de Seleção de Lentes para Espaços Altos
A lente determina a geometria de cobertura de um sensor. Em aplicações de alta altura, é uma escolha crítica entre opções grande-angular e estreito-angular.
Lentes grande-angular (110-180 graus) são padrão para montagens no teto em garagens de tamanho moderado, projetadas para cobrir uma ampla área do piso a partir de um ponto. A desvantagem é um alcance efetivo mais curto. Em alturas maiores, as bordas de um cone grande-angular tornam-se muito rasas e perdem sensibilidade.
Lentes estreito-angular (60-90 graus) focar o cone de detecção em um feixe mais estreito e de maior alcance. Uma lente de 60 graus pode detectar movimento a 12 metros ou mais de distância, tornando-a ideal para gabiões longos e estreitos ou aplicações montadas na parede. Sua compensação é a redução da cobertura lateral, criando pontos cegos em uma sala ampla, a menos que múltiplos sensores sejam utilizados.
A escolha depende da forma da sala. Para gabiões quadrados com tetos moderados (3,5-5 metros), uma lente grande angular no teto funciona bem. Para gabiões longos e estreitos, lentes de ângulo estreito nas paredes finais proporcionam cobertura superior. Para tetos muito altos (mais de 5,5 metros), sensores montados na parede com ângulo estreito geralmente são a única solução confiável de sensor único.
Zoneamento Multi-Sensor para Cobertura Completa
Para espaços grandes ou complexos, um único sensor sempre terá limitações. A abordagem profissional é o zoneamento multi-sensor, que usa um arranjo coordenado de sensores para criar cobertura completa e sobreposta.
Calculando Sobreposição de Cobertura

Em vez de tentar ampliar o alcance de um sensor, implante dois ou mais com zonas de detecção sobrepostas. Isso garante uma transição suave à medida que uma pessoa se move pelo espaço. O padrão da indústria é projetar para uma sobreposição de 30-50%. Se um sensor tiver um diâmetro efetivo de 6 metros, o próximo deve estar posicionado a, no máximo, 4 metros de distância. Isso garante que qualquer ponto no chão seja coberto por pelo menos um sensor, eliminando lacunas.
Lidando com Cantos e Obstáculos
Mesmo com espaçamento adequado, cantos e objetos grandes criam zonas mortas. A visão de um sensor é uma linha reta; ele não consegue enxergar ao redor de uma coluna de suporte ou através de um veículo em uma elevação. A solução é cobertura suplementar direcionada. Um sensor pequeno e dedicado colocado em um canto ou do lado oposto de um obstáculo pode eliminar essas zonas de sombra sem interromper a disposição principal.
O zoneamento não é sobre adicionar mais sensores; é sobre posicionamento estratégico. Um sistema bem projetado fornece cobertura uniforme e detecção confiável porque cada sensor opera dentro de seu alcance e sensibilidade ideais.
Procura soluções de poupança de energia activadas por movimento?
Contacte-nos para obter sensores de movimento PIR completos, produtos de poupança de energia activados por movimento, interruptores com sensor de movimento e soluções comerciais de Ocupação/Vazio.
Posicionamento de Sensores para Evitar Disparos Falsos
A etapa final é posicionar os sensores para ignorar a atividade térmica e mecânica normal de um workshop. Isso é sobre posicionamento, não sobre reduzir a sensibilidade.
Interferência Térmica: Posicione os sensores de modo que seus cones não intersectem o fluxo de ar dos aquecedores de ar forçado ou saídas de HVAC. Mantenha-os inclinados para longe de grandes portas superiores, que introduzem rápidas mudanças de temperatura ao serem abertas. Se uma porta precisar estar na área de detecção, um curto atraso no disparo do sensor pode filtrar o evento transitório.
Objetos em Movimento: Sensor de montagem onde cabos, mangueiras ou ferramentas penduradas estão estacionários em relação ao campo de visão do sensor. Um sensor montado diretamente acima de uma mangueira de ar pendurada não o verá como movimento, mesmo que ele oscile.
Sensores sem fio oferecem muito mais flexibilidade para este tipo de posicionamento estratégico, pois não são restritos por tubos existentes. Seja com fios ou sem fio, a estratégia é a mesma: usar posicionamento, ângulo e tipo de lente para resolver lacunas na detecção e falsos disparos, mantendo a sensibilidade no nível recomendado pelo fabricante.