
De belofte van een slimme woning sterft vaak om twee uur 's ochtends, wanneer een kat een bewegingssensor trapt en de woonkamer overspoelt met licht. Het stopt wanneer de hond die door de gang zwalkt een schakelaar activeert die alleen voor mensen is bedoeld, of wanneer een gordijn dat in de bries beweegt, wordt aangezien voor bezetting. Binnen enkele weken heeft de gefrustreerde huiseigenaar de gevoeligheid van de sensor verlaagd zodat deze geen echte mensen meer oppikt, of de automatisering volledig uitgeschakeld. De beoogde efficiëntie wordt een last, en dure hardware blijft ongebruikt liggen.
Dit is geen falen van technologie. Het is een falen van configuratie. De natuurkunde die een sensor toestaat beweging te detecteren, onderscheidt niet inherent een Duitse herder van een volwassen mens. Maar de verschillen in hoe deze twee onderwerpen ruimte innemen, warmte genereren en bewegen, zijn echt en kunnen worden geëxploiteerd. Met de juiste installatie kunnen die verschillen worden omgezet in betrouwbare discriminatie.
De oplossing is geen gevoeliger hardware of dure AI-gestuurde camera’s. Het is de gedisciplineerde toepassing van drie mechanische strategieën: het vormen van het verticale gezichtsveld van de sensor, bewust kiezen van een montagehoogte en het afstemmen van gevoeligheidsdrempels. Gezamenlijk zorgen deze technieken ervoor dat valse activeringen door huisdieren en incidentele bewegingen worden verminderd, terwijl menselijke detectie rotsvast blijft. Het resultaat is automatisering die werkt.
Het Verlatingsprobleem: Wanneer Huisdieren Automatisering Doorbreken
De cyclus is teleurstellend bekend. Een nieuwe bewegingssensor wordt geïnstalleerd met fabrieksinstellingen, vaak op een handige hoogte in plaats van een optimale. Een paar dagen werkt het perfect. Lampen gaan aan wanneer iemand een kamer binnenkomt. Het systeem lijkt intelligent.
Daarna begint de kat zijn nachtelijke patrouille. De hond beweegt rusteloos van de ene slaapplek naar de andere. De sensor wordt geactiveerd, de lichten gaan aan en de slaap wordt verstoord. In eerste instantie is het slechts een irritatie. Maar met tientallen valse activaties per week wordt het probleem systemisch. De huiseigenaar keert zich ertegen door de gevoeligheid te verlagen. Dit helpt, voor even. Maar snel begint het systeem echte menselijke aanwezigheid te missen — een persoon die langzaam beweegt, vanaf een vreemde hoek binnenkomt of langs de rand van het detectiegebied loopt. De automatisering is onbetrouwbaar geworden in beide richtingen.
Opgeven is de enige rationele reactie. Het beloofde gemak is uitgegroeid tot een onderhoudsbeurt. De hardware blijft aan de muur, inert, terwijl het huishouden terugkeert naar handmatig schakelen. Dit resultaat is niet zeldzaam; het is de overheersende foutmodus voor bewegingscontrole in huizen met huisdieren. Het verlies is niet alleen de kosten van de hardware, maar ook het voortdurende energieverlies dat het systeem moest voorkomen.
Hoe bewegingssensoren überhaupt iets detecteren

Passieve infraroodsensoren (PIR), de ruggengraat van woningautomatisering, zijn in wezen warmteverschil detectors. Elk object dat warmer is dan absoluut nul straalt infrarode energie uit. Een PIR-sensor gebruikt een speciaal pyro-electrisch element, dat meestal is verdeeld in twee of meer zones, om veranderingen in dit omgevings-infrarode veld te meten. Wanneer een warm lichaam van de ene naar de andere zone beweegt, genereert het element een klein spanningsverschil. Als dat signaal een ingestelde drempel overschrijdt, meldt de sensor een detection.
Op zoek naar bewegingsgevoelige energiebesparende oplossingen?
Neem contact met ons op voor complete PIR-bewegingssensoren, bewegingsgeactiveerde energiebesparende producten, bewegingssensorschakelaars en commerciële Occupancy/Vacancy-oplossingen.
Een PIR-sensor “ziet” niet in de zin van visuele beeldvorming. Hij registreert thermische beweging. Daarom detecteert hij een kat even gemakkelijk als een persoon. Beide zijn warme lichamen die een temperatuurcontrast vormen ten opzichte van een koeler muur of vloer. Terwijl de kat beweegt, verschuift hij tussen de detectiegebieden van de sensor, wat hetzelfde soort signaal oplevert als een mens zou doen. Het signaal van een persoon kan sterker zijn, maar de fundamentele gebeurtenis is identiek. De sensor heeft geen inherent concept van grootte of hoogte. Hij reageert op verandering.
Microsensoren gebruiken een ander principe, maar krijgen hetzelfde probleem. Ze zenden een continue, laagvermogen radiofrequentiesignaal uit en luisteren naar Doppler-shifts in de reflectie. Elk object dat naar toe of weg beweegt van de sensor, zal de frequentie van de gereflecteerde golf veranderen. Een hond die door de kamer loopt, veroorzaakt een Doppler-shift die net zo meetbaar is als die van een persoon. Net als de PIR weet de microgolf sensor alleen dat er iets beweegt, niet wat er beweegt.
Standaard zijn beide types sensoren ontworpen om inclusief te zijn. Ze zijn gebouwd om beweging vast te leggen, wat ideaal is voor een alarmsysteem maar rampzalig voor huisautomatisering die alleen op mensen moet reageren. een van Bewegingsdetectie, wat ideaal is voor een beveiligingssysteem maar rampspoedig voor huisautomatisering die alleen op mensen moet reageren. Zonder specifieke beperkingen, zal de sensor trouw elke huisdier, elke verschuivende gordijn en zelfs een grote insect dat recht over de lens kruipt, rapporteren.
De Exploiteerbare Verschillen Tussen Huisdieren en Mensen
Hoe leren we een eenvoudige sensor slimmer te zijn? We maken gebruik van de fysieke verschillen tussen mensen en huisdieren.

Het eerste en meest betrouwbare verschil is verticale positionering. Een staand of zittend volwassene bevindt zich binnen een hoogtebereik dat een kat of kleine hond simpelweg niet bereikt. Zelfs een grote hond op handen en knieën houdt zijn lichaamswarmte en massale lichaamsgrootte veel lager bij de grond dan een mensen-torso. De meeste bewegingen van mensen vinden plaats boven drie meter van de vloer; de meeste huisdierenbewegingen zijn geconcentreerd in de onderste twee meter. Deze verticale scheiding is ons primaire voordeel.
Het tweede verschil is de grootte van de warmteafdruk. Een menselijk lichaam is een grotere infraroodbron dan een klein dier, verdeeld over een groter verticaal gebied. Dit betekent dat een persoon doorgaans een sterker, langduriger signaal zal produceren. Deze factor is minder betrouwbaar dan hoogte, omdat afstand de zaken bemoeilijkt. Een kat die heel dicht bij de sensor staat, kan een signaal produceren dat net zo sterk is als dat van een persoon die verder weg staat. Grootte is een nuttige secundaire filter, maar het kan niet de enige zijn.
Het derde verschil, bewegingspatroon, is het zwakste van allemaal. Mensen en huisdieren bewegen beide met variabele snelheden. Een persoon die 's nachts op de tenen loopt, kan zo langzaam bewegen als een kat die sluipt. Een hond die hard wegrent naar de deur beweegt sneller dan een persoon die loopt. Hoewel sommige geavanceerde systemen proberen om het looppatroon te analyseren, zijn deze methoden te fragiel voor de meeste huizen. Voor onze doeleinden is het bewegingspatroon geen betrouwbare variabele.
Verticale gezichtsveldvorming: Engineering van blinde zones

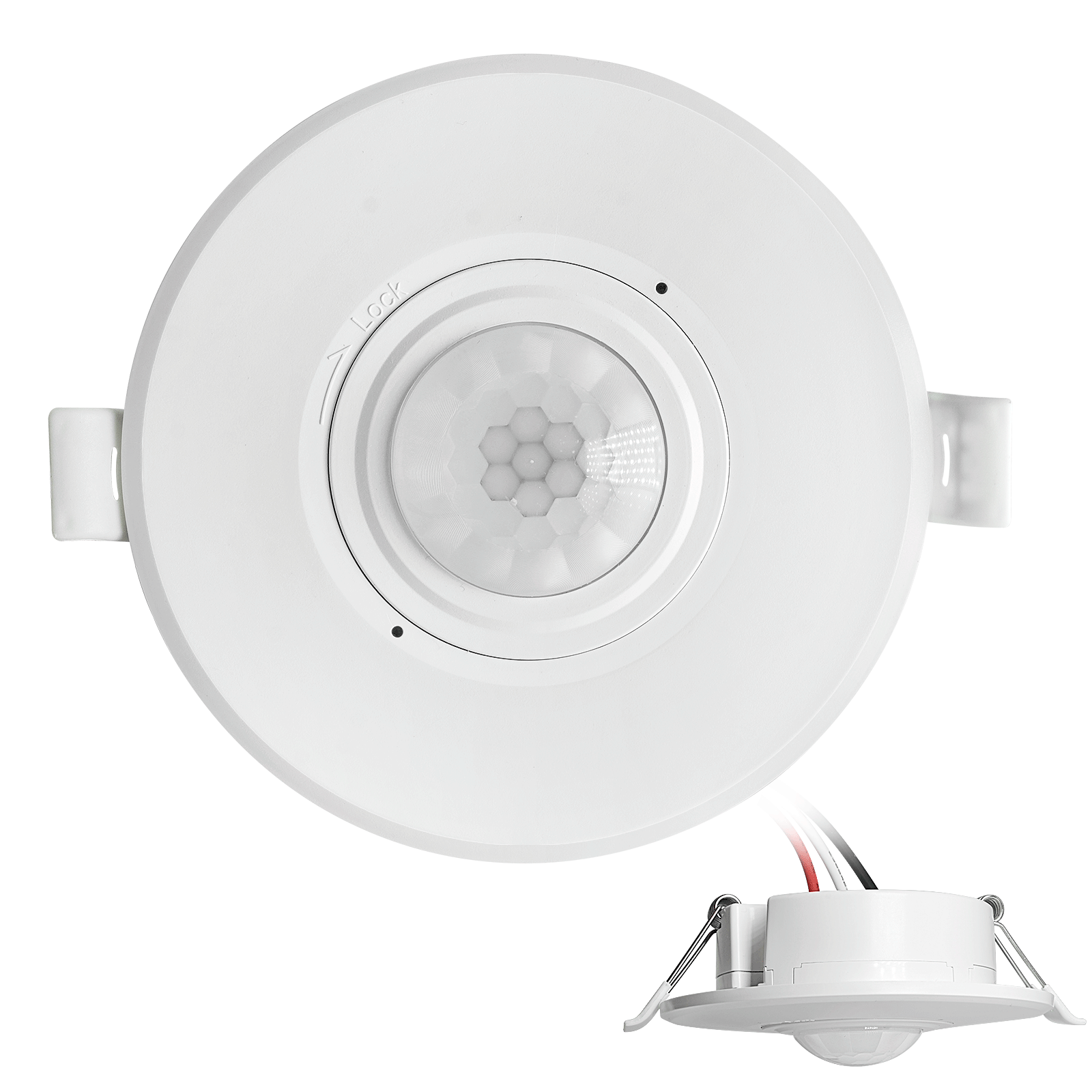
De meest effectieve strategie is het creëren van een ingenieus blinde vlek. Het vormen van het gezichtsveld beperkt het detectiegebied van de sensor opzettelijk tot het verticale zone waar huisdieren leven en bewegen. Dit is een mechanische oplossing, geen softwarefilter.
De Fresnel-lens van een PIR-sensor is onderverdeeld om infraroodenergie uit specifieke hoeken op de sensorelementen te richten. Door delen van deze lens fysiek te maskeren, of door een lens met opzettelijke dode zones te gebruiken, kunnen we de sensor blind maken voor het onderste deel van het gezichtsveld. Het gebied op vloerhoogte wordt eenvoudigweg verwijderd uit de detectiegeometrie.
Een correct gevormde “huisdier-immuun” sensor heeft een blinde zone die zich uitstrekt van de vloer tot ongeveer tweeënhalf voet. Een kat die er direct onder loopt, is onzichtbaar; de infrarode energie die het uitstraalt, wordt nooit gericht op de actieve zones van de sensor. Maar wanneer een persoon dezelfde ruimte binnenloopt, bewegen hun romp en hoofd door de actieve hogere zones, en activeert de sensor onmiddellijk. Dit is geen kansspel; het is een geometriale zekerheidsmaat. De sensor kan de vloer niet zien, net zoals een camera op het plafond niet kan.
Deze techniek is opmerkelijk effectief, maar heeft limieten. Eén is een zeer grote hond, wiens hoofd en schouders net de onderkant van de actieve zone kunnen raken. De andere is een klimmend huisdier. Een kat die op een aanrecht of de achterkant van een bank springt, zal zichzelf in het actieve veld verhogen en de sensor activeren. Dit zijn geen fouten van de methode, maar erkenning van de grenzen ervan.
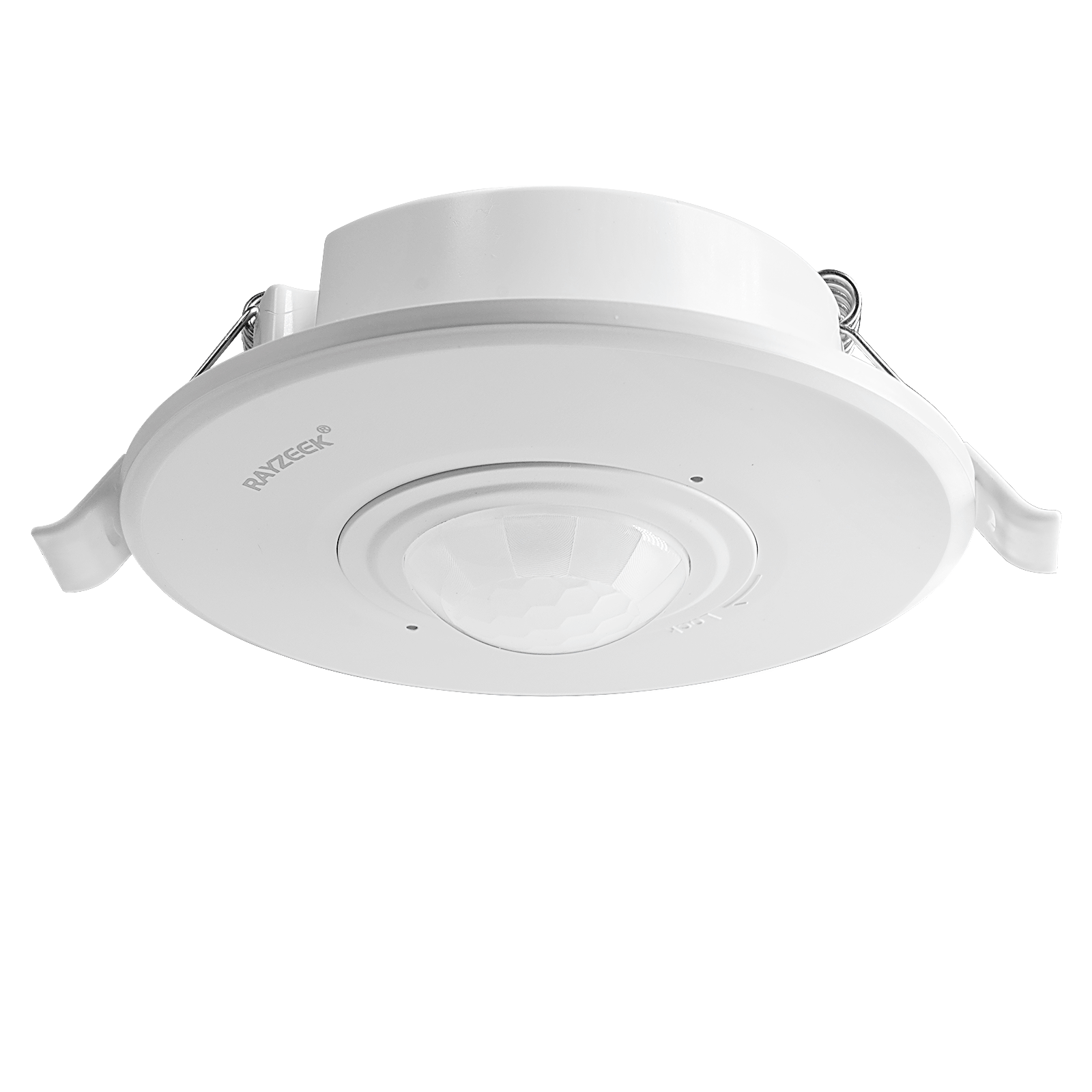
Montagehoogte als basis
Hoe hoger een sensor wordt gemonteerd, hoe steiler de neerwaartse kijkhoek wordt. Deze steile hoek comprimeert het verticale gezichtsveld, waardoor de onderste detectiegrens effectief wordt verhoogd. Op zes voet kan een sensor een blinde zone van twee voeten vanaf de vloer hebben. Plaats hetzelfde apparaat op acht voet, en de blinde zone kan zich uitstrekken tot bijna drie voeten. Hoogte is de basis van huisdier-immuunheid.
Dit is waarom installatiehandleidingen voor huisdier-immuun sensoren zo specifiek zijn over de montagemeting. Een sensor gemonteerd op standaard schakelaarhoogte (ongeveer vier voeten) heeft een vlakke neerwaartse hoek en bijna geen blinde zone op de vloer. Het zal alles zien. Dezelfde sensor op zeven of acht voet hoogte krijgt een aanzienlijke immuniteit omdat de warmteafdruk van het huisdier, geconcentreerd nabij de vloer, nooit de actieve detectiecone van de sensor raakt.
Laat u inspireren door Rayzeek Motion Sensor Portfolio's.
Vind je niet wat je zoekt? Maak je geen zorgen. Er zijn altijd alternatieve manieren om je problemen op te lossen. Misschien kan een van onze portfolio's helpen.
De compromis is een lichte vermindering van de horizontale dekking, omdat een hoog gemonteerde sensor een kleine dode zone direct onder zich creëert. Voor de meeste kamers is dit geen probleem. In zeer grote ruimtes kan het beter zijn om twee strategisch geplaatste sensoren te gebruiken in plaats van één apparaat op een tekortschietende hoogte.
Als je geen gaten kunt boren, wees creatief. Gebruik een hoge boekenkast, een vrijstaande paal of een beugel op een meubelstuk om de sensor op de benodigde hoogte te krijgen. De bevestigingsmethode is secundair; de hoogte is alles.
Sensorgevoeligheidniveaus: De laatste afstelling
Sensorgevoeligheid bepaalt de minimale signaalsterkte die nodig is om een detectie te activeren. Zie het als een volumeknop. Het verlagen van de gevoeligheid verhoogt drempelwaarde, waardoor een grotere of dichtere warmtebron nodig is om een gebeurtenis te activeren.
Na het vormgeven van het gezichtsveld en het bepalen van de montagemaat, fungeert de gevoeligheid afstelling als een laatste filter. Het helpt randgevallen te beheren, zoals een grote hond die net de actieve zone raakt of een kat die af en toe op een lage tafel klimt. Door de gevoeligheid net hoog genoeg in te stellen om betrouwbaar een mens te detecteren maar onder de drempel voor deze kleine huisdier-signalen, verkrijg je een extra foutmarge.
Misschien bent u geïnteresseerd in

- Ceiling-mounted PIR occupancy sensor with dry-contact relay output
- 12/24VDC or 12/24VAC low-voltage supply
- COM, NO, and NC isolated relay contacts for EMS, HVAC, and building control inputs

- Low-voltage DC recessed ceiling-mounted microwave motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- 10A max work current with adjustable time delay, Lux threshold, and sensitivity
- Higher-load recessed ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Recessed ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Ceiling-mounted RZ037 PIR occupancy sensor dimmer for 220V power
- 3A maximum working current with 660W rated load
- LUX button controls light-sensor ON/OFF and user-set dimming brightness
- Ceiling-mounted RZ037 PIR occupancy sensor dimmer for 110V power
- 3A maximum working current with 330W rated load
- LUX button controls light-sensor ON/OFF and user-set dimming brightness

- Low-voltage DC ceiling-mounted microwave motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- 10A max work current with adjustable time delay, Lux threshold, and sensitivity
- Higher-load ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Low-voltage DC recessed ceiling mount PIR motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- Max work current 10A with adjustable time delay, Lux threshold, and sensitivity
- Higher-load recessed ceiling mount PIR motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 360-degree detection with adjustable time delay, Lux threshold, and sensitivity
- Recessed ceiling mount PIR motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 360-degree detection with adjustable time delay, Lux threshold, and sensitivity
- Wireless switch and receiver kit for indoor ON/OFF lighting control
- 100-230VAC, 50/60Hz receiver with 5A rated current
- CR2032-powered wireless switch with 2.4GHz communication
- Bezetting (Auto-AAN/Auto-UIT)
- 12–24V DC (10–30VDC), tot 10A
- 360° bereik, diameter 8–12 m
- Tijdvertraging 15 s–30 min
- Lichtsensor Uit/15/25/35 Lux
- Hoge/Low gevoeligheid
- Auto-Aan/Auto-Uit bezettingsmodus
- 100–265V AC, 10A (neutraal vereist)
- 360° bereik; detectiebereik van 8–12 m
- Tijdvertraging 15 s–30 min; Lux UIT/15/25/35; Gevoeligheid Hoog/Laag
- Auto-Aan/Auto-Uit bezettingsmodus
- 100–265V AC, 5A (neutraal vereist)
- 360° bereik; detectiebereik van 8–12 m
- Tijdvertraging 15 s–30 min; Lux UIT/15/25/35; Gevoeligheid Hoog/Laag

- 100V-230VAC
- Transmissieafstand: tot 20m
- Draadloze bewegingssensor
- Vastgebaseerde bediening

- Voltage: 2x AAA Batterijen / 5V DC (Micro USB)
- Dag/nachtmodus
- Tijdvertraging: 15min, 30min, 1h (standaard), 2h

- EU-stekkeradapter

- UK-stekkeradapter
Het vinden van de juiste balans vereist iteratie, geen berekening. Het verschil in signaalsterkte tussen een kleine persoon aan de rand van de kamer en een grote hond in het midden kan klein zijn. Stel het te laag af, en je mist mensen. Stel het te hoog af, en de hond activeert het. Het doel is om het punt te vinden waarop menselijke detectie betrouwbaar is en huisdier-activaties worden verminderd tot een acceptabele, bijna nul frequentie. Sommige geavanceerde sensoren bieden zelfs verschillende gevoeligheidsniveaus voor dag en nacht, waardoor de regels worden aangescherpt wanneer valse alarmen het meest storend zijn.
Waarom mislukken alleen magnetrons in kleine huizen
Microsensormodules worden soms gepromoot als een superieure oplossing, die theoretisch in staat is om de snelheid en massa van een object te analyseren op basis van de Doppler-handtekening. In een grote open ruimte kan dit werken. In een kleine, gemeubileerde kamer faalt de fysica echter.
Het probleem is multipad-reflectie. Het signaal van de sensor reist niet alleen naar het doel en terug; het kaatst af op muren, meubels en apparaten. Deze reflecties creëren een lawaaierige, chaotische signaalomgeving. Een kleine bewegende kat kan veel groter lijken door constructieve interferentie van reflecties, terwijl een persoon kleiner lijkt door destructieve interferentie. Het vermogen van de sensor om te discrimineren op basis van grootte wordt volledig onbetrouwbaar. In een typische keuken of slaapkamer genereert een sensoren die alleen op microgolven werken vaak meer valse huisdier-trigger dan een slecht afgestelde PIR.
Sensors met dubbele technologie, die PIR en microgolven combineren en vereisen dat beide het eens zijn voordat ze activatie geven, zijn een veel betere benadering. De PIR biedt de robuuste geometrische discriminatie van hoogte en gezichtsveldvorming. De microgolf voegt een secundaire bevestiging van beweging toe. Een kat op de vloer kan de microgolf-sensor misleiden door verstoorde reflecties, maar het is onzichtbaar voor het gemaskeerde lagere veld van de PIR. Omdat beide niet activeren, wordt het alarm onderdrukt, waardoor de meeste valse positieven worden uitgefilterd.
Testconfiguratie met opzettelijke paden
Een geconfigureerde sensor is een onbewezen hypothese. Om deze te valideren, heb je een gestructureerde walkthrough nodig.
De testprocedure is eenvoudig:
- Loop op een normaal tempo door het dekkingsgebied vanaf iedere ingang. Bevestig dat de sensor betrouwbaar afgaat.
- Test de grenzen. Loop langzaam en aan de verste randen van de kamer om de grenzen van menselijke detectie te vinden.
- Laat je huisdieren vrij rondlopen. Kijk of hun normale paden, vooral recht onder de sensor, een activatie veroorzaken.
- Moedig indien mogelijk klimmen aan. Lok de kat op de bank of een lage plank om te zien of die specifieke actie een vals alarm veroorzaakt.
- Pas aan en herhaal. Als een grote hond nog steeds de sensor activeert, probeer dan de gevoeligheid met een stand te verlagen of de bevestingshoogte met zes inches te verhogen, en voer de test opnieuw uit.
Deze iteratieve, praktische testresultaten bieden feedback die veel waardevoller is dan welke specificatieblad dan ook. Onthoud dat het doel niet alleen een technisch perfect systeem is, maar een dat zonder stress uw dieren laat functioneren. Een opstelling die werkt maar de hond nerveus maakt door plotselinge lichten, is gefaald. Het ware teken van succes is een systeem dat zo goed is afgesteld dat uw huisdieren niet eens doorhebben dat het er is.







