En regiones tropicales, los sensores de movimiento luchan una batalla constante contra el entorno. Un gecko cruzando una pared o una polilla arrastrándose sobre la lente puede activar una cascada de falsas alarmas, lo que conduce a un consumo de energía innecesario, usuarios frustrados y la falsa creencia de que el sensor está roto.

No lo es. El sensor cumple perfectamente su función al detectar calor y movimiento. El problema es que en los trópicos, todo está caliente y todo se mueve. La alta densidad de insectos y pequeños reptiles difumina la línea entre que una persona entre en una habitación y un disparo molesto. El sensor no puede distinguir entre ellos; ambos generan la firma infrarroja que fue diseñado para detectar.
Las soluciones viables no se encuentran en un ajuste de sensibilidad mítico ni en una actualización de firmware. Se encuentran en decisiones deliberadas de montaje, barreras físicas y hábitos de mantenimiento inteligentes. La realidad es que no puedes eliminar estos factores ambientales mediante ingeniería. Solo puedes gestionarlos a través de una instalación reflexiva y expectativas realistas.
Por qué los insectos y pequeños reptiles activan los sensores de movimiento
")
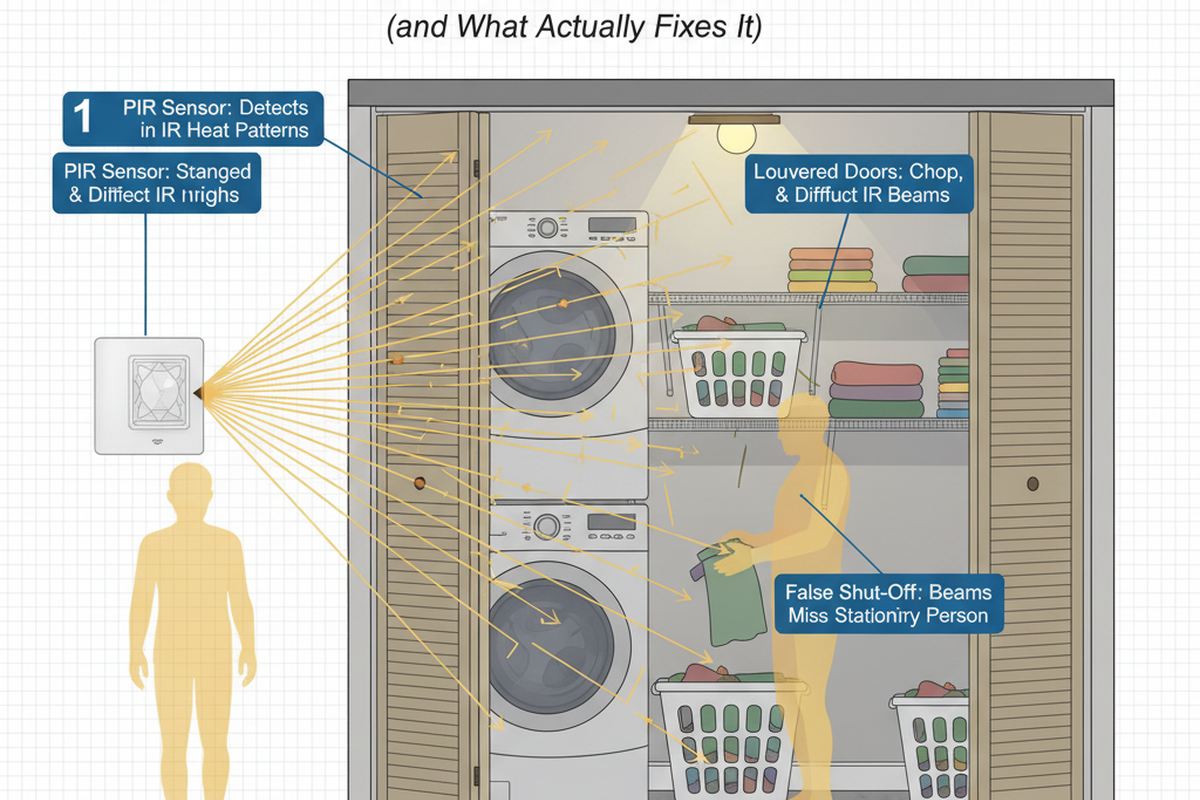
Los sensores infrarrojos pasivos (PIR) funcionan midiendo cambios en la radiación infrarroja. La lente enfoca el calor del entorno en un sensor pyroelectric dividido en zonas. Cuando una fuente de calor se mueve de una zona a otra, el sensor registra un cambio diferencial. Si ese cambio cruza un umbral preestablecido, activa una alerta.
Este mecanismo no discrimina. Una polilla, un gecko o un humano emiten radiación infrarroja porque son más cálidos que su entorno. El sensor solo evalúa si ha ocurrido un cambio suficiente en la firma térmica. Un insecto grande arrastrándose directamente sobre la lente genera un cambio localizado masivo en la intensidad infrarroja. Una lagartija pequeña que corre por una pared genera una firma térmica en movimiento que, según la lógica del sensor, imita a un objeto mucho más grande más lejos. La proximidad amplifica el tamaño aparente de la fuente de calor, por lo que un escarabajo a solo una pulgada de la lente puede crear una firma infrarroja comparable a una persona caminando a diez pies de distancia. El sensor no puede interpretar la distancia o la escala; simplemente responde a la física del diferencial infrarrojo.
Detección de Firma Térmica en Condiciones Tropicales
Los entornos tropicales comprimen el rango térmico entre la temperatura ambiente y los organismos vivos. En un clima templado, una habitación de 70 °F y una persona de 98 °F presentan una diferencia clara de 28 grados. En una casa tropical donde la temperatura ambiente puede ser de 85-90 °F, esa diferencia se reduce a menos de 15 grados. Para detectar confiablemente a los humanos en este rango estrecho, el sensor debe ser más sensible. Sin embargo, esta sensibilidad aumentada lo hace mucho más propenso a activarse por fuentes de calor más pequeñas que serían ignoradas en climas más fríos.
La alta humedad complica aún más la detección, ya que el vapor de agua absorbe y dispersa la radiación infrarroja, creando un fondo térmico inestable. El sensor recalibra constantemente esta línea base cambiante, donde cualquier movimiento, incluso una mosca cruzando la lente, puede registrarse como un evento importante. Añádele una densidad de insectos que es órdenes de magnitud mayor que en zonas templadas, y las activaciones falsas se vuelven una condición predecible y recurrente.
¿Busca soluciones de ahorro de energía activadas por movimiento?
Póngase en contacto con nosotros para obtener sensores de movimiento PIR completos, productos de ahorro de energía activados por movimiento, interruptores con sensor de movimiento y soluciones comerciales de ocupación/vacancia.
Arrastramiento de insectos versus movimientos de lagartijas
Los insectos que arrastran directamente sobre la lente del sensor causan las falsas alarmas más dramáticas. Una polilla o escarabajo a pocos milímetros del elemento pyroelectric genera un pico infrarrojo que pasa por encima del umbral de activación. Los insectos que arrastran también tienden a permanecer, causando activaciones repetidas a medida que cambian de posición.
Las lagartijas y geckos crean una firma diferente. Se mueven en ráfagas cortas y rápidas a lo largo de paredes o techos dentro del campo de visión del sensor. La velocidad de su movimiento y tamaño caen dentro del rango que el sensor está diseñado para detectar. A diferencia de un insecto sobre la lente, una lagartija es una fuente legítima de calor en movimiento dentro del campo de detección; simplemente no es el objetivo deseado. Esta distinción es crucial para la mitigación. Los arrastramientos de insectos pueden detenerse con barreras físicas, pero los movimientos de lagartijas requieren estrategias de montaje más inteligentes. El desafío no es un sensor roto, sino una desajuste entre la tecnología y su entorno. Afortunadamente, este desajuste puede gestionarse con una instalación inteligente.
Altura y ángulo de montaje reducen el acceso de las arácnidas

La forma más efectiva de reducir las falsas alarmas relacionadas con insectos es montar el sensor donde estos no puedan alcanzar fácilmente la lente. Esta es una solución permanente y de bajo mantenimiento que aborda la causa raíz del problema.
Tal vez le interese

- Ceiling-mounted PIR occupancy sensor with dry-contact relay output
- 12/24VDC or 12/24VAC low-voltage supply
- COM, NO, and NC isolated relay contacts for EMS, HVAC, and building control inputs

- Low-voltage DC recessed ceiling-mounted microwave motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- 10A max work current with adjustable time delay, Lux threshold, and sensitivity
- Higher-load recessed ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Recessed ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Ceiling-mounted RZ037 PIR occupancy sensor dimmer for 220V power
- 3A maximum working current with 660W rated load
- LUX button controls light-sensor ON/OFF and user-set dimming brightness
- Ceiling-mounted RZ037 PIR occupancy sensor dimmer for 110V power
- 3A maximum working current with 330W rated load
- LUX button controls light-sensor ON/OFF and user-set dimming brightness

- Low-voltage DC ceiling-mounted microwave motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- 10A max work current with adjustable time delay, Lux threshold, and sensitivity
- Higher-load ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Low-voltage DC recessed ceiling mount PIR motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- Max work current 10A with adjustable time delay, Lux threshold, and sensitivity
- Higher-load recessed ceiling mount PIR motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 360-degree detection with adjustable time delay, Lux threshold, and sensitivity
- Recessed ceiling mount PIR motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 360-degree detection with adjustable time delay, Lux threshold, and sensitivity
- Wireless switch and receiver kit for indoor ON/OFF lighting control
- 100-230VAC, 50/60Hz receiver with 5A rated current
- CR2032-powered wireless switch with 2.4GHz communication
- Ocupación (Encendido automático/Apagado automático)
- 12–24V DC (10–30VDC), hasta 10A
- Cobertura de 360°, diámetro de 8–12 m
- Retardo de tiempo 15 s–30 min
- Sensor de luz Apagado/15/25/35 Lux
- Alta/Baja sensibilidad
- Modo de ocupación Auto-ON/Auto-OFF
- 100–265V CA, 10A (se requiere neutro)
- Cobertura de 360°; diámetro de detección de 8–12 m
- Retardo de tiempo 15 s–30 min; Lux APAGADO/15/25/35; Sensibilidad Alta/Baja
- Modo de ocupación Auto-ON/Auto-OFF
- 100–265V AC, 5A (se requiere neutro)
- Cobertura de 360°; diámetro de detección de 8–12 m
- Retardo de tiempo 15 s–30 min; Lux APAGADO/15/25/35; Sensibilidad Alta/Baja

- 100V-230VAC
- Distancia de transmisión: hasta 20m
- Sensor de movimiento inalámbrico
- Control cableado

- Voltaje: 2 pilas AAA / 5 V CC (Micro USB)
- Modo Día/Noche
- Tiempo de retardo: 15min, 30min, 1h(por defecto), 2h

- Adaptador de corriente con enchufe europeo

- Adaptador de corriente con enchufe del Reino Unido
- Altura óptima de montaje: Posicione los sensores montados en la pared a siete u nueve pies del suelo. Esto sitúa la unidad por encima de las rutas principales de los insectos arrastrándose, que tienden a estar cerca del suelo o alrededor de las instalaciones en la mitad de la pared, mientras detecta de manera confiable el movimiento humano debajo.
- Inclinación hacia abajo: Incline el sensor hacia abajo en un ángulo de cinco a quince grados. Esto dirige el campo de detección hacia el piso, donde están las personas, y aleja del techo, donde merodean lagartijas e insectos. También hace que la parte superior de la carcasa sea menos horizontal, lo que desanima a los insectos a aterrizar y descansar en ella.
- Montaje en esquina: Los insectos que siguen las paredes a menudo se pierden en las esquinas internas. Montar el sensor en o cerca de una esquina interrumpe la trayectoria continua de superficie que un insecto puede seguir para alcanzar la lente, haciéndolo especialmente efectivo contra hormigas y escarabajos.
- Montaje en el techo: En espacios con techos altos, un sensor montado en el techo puede funcionar si su patrón de detección es estrecho y enfocado en el suelo. Esta estrategia avanzada requiere un sensor con una lente ajustable o intercambiable para excluir el plano del techo del campo activo.
Los límites físicos superan los ajustes de configuración
El primer instinto cuando se enfrentan a falsos disparos es reducir la sensibilidad. Este enfoque es atractivo porque no requiere herramientas, pero también es en gran medida ineficaz. Las configuraciones de sensibilidad ajustan el umbral del disparador, pero no pueden enseñar a un sensor a distinguir una polilla de una persona. Un insecto arrastrándose sobre la lente crea una firma infrarroja tan masiva que incluso la sensibilidad más baja la detectará.
Las barreras físicas son mucho más efectivas porque eliminan el problema por completo del entorno del sensor.
- Cubiertas de lente y escudos direccionales: Las cubiertas son extensiones similares a túneles que crean un laberinto físico que los insectos arrastrándose no pueden navegar fácilmente. Los escudos direccionales usan deflectores inclinados para bloquear el acceso en línea recta a la lente, desviando los insectos alejándolos de la superficie sensible.
- Protecciones y pantallas de malla de posventa: Para sensores sin protección incorporada, se puede instalar una malla de acero inoxidable fina (con un tamaño de malla de aproximadamente un milímetro) sobre la lente. La malla es lo suficientemente fina para bloquear insectos pero lo suficientemente abierta para permitir que la radiación infrarroja pase, evitando el contacto directo con la lente sin impedir la detección.
Estas barreras son pasivas, confiables y mecánicas, no algorítmicas. Reducir la sensibilidad o el alcance lo suficiente como para detener los disparadores de insectos a menudo significa que el sensor también pasará por alto actividades humanas legítimas, creando un tipo diferente de fallo. No existe una configuración mágica que permita a un sensor distinguir una escarabajo en la lente de una persona al otro lado de la habitación.
Límites de umbral de luz ambiental para limitar desencadenantes molestos nocturnos
La mayoría de los sensores de movimiento incluyen una fotocélula que solo permite la activación cuando los niveles de luz caen por debajo de un umbral establecido. Esta función está diseñada para ahorrar energía durante el día, pero en los trópicos, cumple otra función crítica: desacoplar el sensor de la actividad nocturna máxima de insectos.
Los insectos nocturnos son atraídos por la luz, incluidos los pequeños LED indicadores en los sensores. Al configurar el umbral de luz ambiente para desactivar el sensor durante la oscuridad total, puedes eliminar toda una categoría de desencadenantes falsos causados por polillas y escarabajos atraídos por el dispositivo por la noche. Este enfoque es una herramienta complementaria, no un reemplazo de las barreras físicas o el correcto montaje. Cuando se usa en combinación con otras estrategias, puede reducir significativamente el número total de eventos de desencadenantes falsos.
Hábitos de mantenimiento que importan más que configuraciones míticas
Un sensor perfectamente instalado aún fallará si no se realiza un mantenimiento adecuado. En ambientes húmedos, los residuos orgánicos, el polvo y los restos de insectos se acumulan rápidamente en la lente. Esta acumulación no solo bloquea la detección; también causa activamente desencadenantes falsos.
Inspírese con las carteras de sensores de movimiento Rayzeek.
¿No encuentra lo que busca? No se preocupe. Siempre hay formas alternativas de resolver sus problemas. Quizá una de nuestras carteras pueda ayudarle.
- Residuo de insectos: Los insectos dejan aceites y fragmentos que forman una película en la lente, dispersando la radiación infrarroja y creando desencadenantes erráticos.
- Moho y crecimiento orgánico: En ambientes con alta humedad, el moho puede crecer en la carcasa del sensor y cerca de la lente, creando sus propias firmas de calor localizadas.
Un sensor en un entorno con alta densidad de insectos debe inspeccionarse visualmente cada dos a cuatro semanas. Si la lente no está perfectamente limpia, necesita limpieza. Limpie la lente y la carcasa con un paño suave, sin pelusas, humedecido con alcohol isopropílico. Verifique que todos los sellos de la carcasa estén intactos para evitar que los insectos entren por dentro. La inversión en este esfuerzo es alta. El mantenimiento regular marca la diferencia entre una instalación funcional y una abandonada.
Aceptar compromisos y establecer expectativas realistas
Incluso con montaje, barreras y mantenimiento perfectos, algunos desencadenantes falsos son inevitables en entornos con una densidad extrema de insectos. El principio fundamental del sensor—detectando cambios en infrarrojo—no puede rediseñarse para ignorar todas las fuentes de calor no humanas sin ignorar también a los humanos.
El objetivo no es cero desencadenantes falsos. El objetivo es una tasa de desencadenantes falsos lo suficientemente baja como para que el sensor aún proporcione un valor neto en el ahorro de energía y conveniencia. Un sensor que se active una o dos veces por noche por un gecko, pero que detecte confiablemente personas, sigue siendo un éxito. Sin embargo, si los desencadenantes falsos se vuelven frecuentes y constituyen una molestia constante, puede ser momento de reconsiderar la ubicación del sensor o cambiar a una tecnología diferente, como un sensor dual que requiera detección PIR y de microondas simultáneamente.
Para instalaciones en zonas tropicales, el éxito proviene de priorizar soluciones físicas sobre perseguir configuraciones míticas, comprometerse con un mantenimiento regular y entender que el sensor responde correctamente a su entorno. El entorno, no el sensor, es la variable que debe gestionarse.