Løftet om et intelligent hjem dør ofte klokken to om morgenen, når en kat snubler over en bevægelsessensor og oversvømmer stuen med lys. Det dør, når hunden, der går rundt i gangen, aktiverer en kontakt, der kun er beregnet til mennesker, eller når et gardin, der bevæger sig i vinden, fejlagtigt opfattes som beboelse. Uger senere har den frustrerede husejer enten justeret sensorens følsomhed ned, så den ofte overser faktiske personer, eller deaktiveret automationen helt. Den tilsigtede effektivitet bliver en plage, og dyre hardware ligger i dvale.
Dette er ikke en fejl i teknologien. Det er en fejl i konfigurationen. Fysikken, der tillader en sensor at registrere bevægelse, adskiller ikke i sig selv en Tyske schæfer fra en voksen person. Men forskellene i, hvordan de to emner optager plads, genererer varme og bevæger sig, er reelle og udnyttelige. Med den rette opsætning kan disse forskelle omdannes til pålideligt skelnen.
Løsningen er ikke mere følsom hardware eller dyre AI-drevne kameraer. Det er den disciplinerede anvendelse af tre mekaniske strategier: at forme sensorens vertikale synsfelt, bevidst vælge en monteringshøjde, og justere følsomhedströskler. Sammen bruger disse teknikker, at reducere falske alarmer fra kæledyr og utilsigtet bevægelse, mens de bevarer pålidelig menneskelig detektion. Resultatet er automation, der fungerer.
Forladelsesproblemet: Når kæledyr bryder automation
Cyklussen er sørgeligt velkendt. En ny bevægelsessensor installeres med fabriksindstillinger, ofte i en bekvem højde i stedet for en optimal. I nogle dage fungerer den perfekt. Lyset tænder, når nogen går ind i et rum. Systemet føles intelligent.
Så begynder katten sin natlige patrulje. Hunden bevæger sig rastløst fra et sovested til et andet. Sensoren udløses, lyset tændes, og søvnen forstyrres. Først er det bare en gene. Men med snesevis af falske aktiveringer om ugen bliver problemet strukturelt. Husejeren kæmper imod ved at sænke følsomheden. Det hjælper, et stykke tid. Men snart begynder systemet at gå glip af faktisk menneskelig tilstedeværelse — en person, der bevæger sig langsomt, kommer ind fra en mærkelig vinkel eller går i kanten af detektionszonen. Automationen er blevet upålidelig i begge retninger.
At give op er den eneste rationelle reaktion. Det lovede behagelighed er blevet til en vedligeholdelsesopgave. Hardwaren sidder stille på væggen, inert, mens husstanden vender tilbage til at skifte med kontaktskyder. Dette resultat er ikke sjældent; det er den dominerende fejltilstand for bevægelseskontrol i hjem med kæledyr. Tabet er ikke kun omkostningen ved hardwaren, men også det løbende energispild, som systemet var beregnet til at forhindre.
Hvordan bevægelsessensorer overhovedet opdager noget

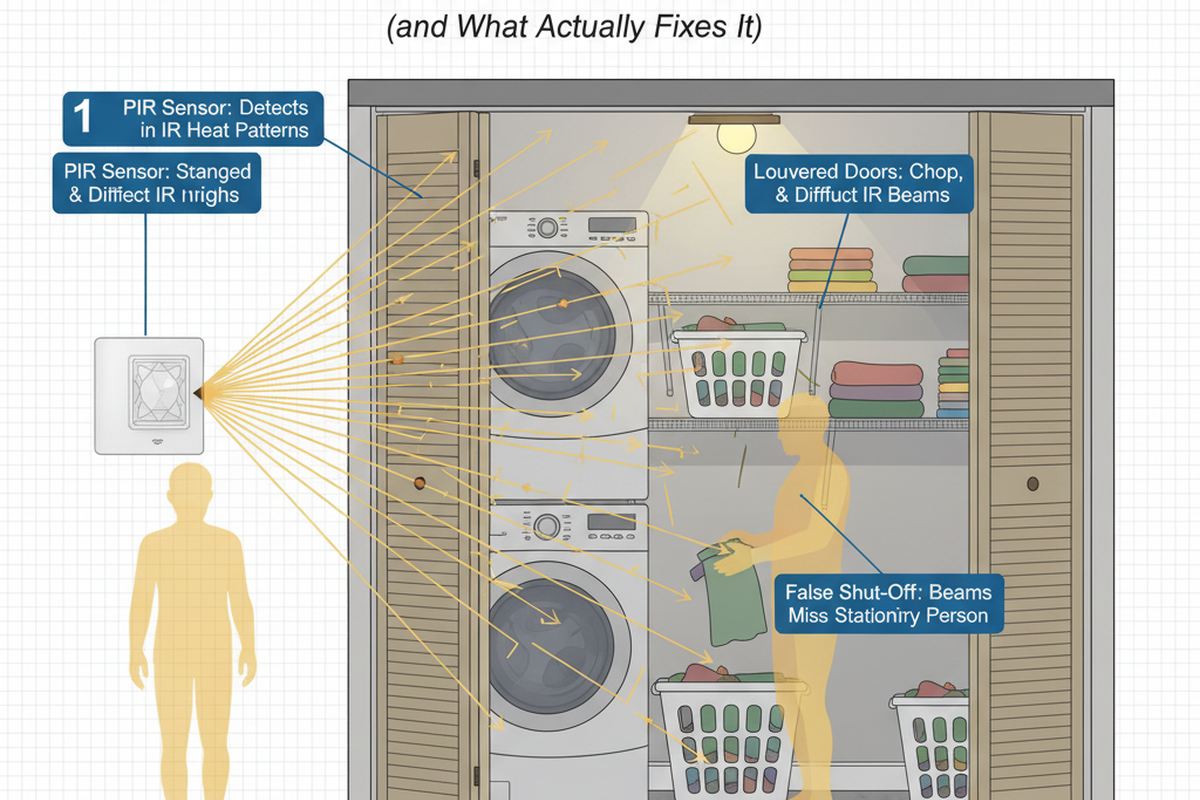
Passive infrarød (PIR) sensorer, arbejdsbenet i boligautomatisering, er grundlæggende varmeforskelsdetektorer. Hvert objekt, der er varmere end absolut nul, udsender infrarødt energifald. En PIR-sensor bruger et specialfremstillet pyroelektrisk element, typisk delt op i to eller flere zoner, til at måle ændringer i dette omgivende infrarøde felt. Når en varm genstand bevæger sig fra en zone til en anden, genererer elementet en lille spændingsforskydning. Hvis dette signal krydser en fastsat tærskel, rapporterer sensoren en detektion.
Leder du efter bevægelsesaktiverede energibesparende løsninger?
Kontakt os for komplette PIR-bevægelsessensorer, bevægelsesaktiverede energibesparende produkter, bevægelsessensorafbrydere og kommercielle løsninger til tilstedeværelse/fravær.
En PIR-sensor 'ser' ikke i nogen visuel forstand. Den registrerer termisk bevægelse. Det er derfor, den registrerer en kat lige så let som en person. Begge er varme kroppe, der skaber en temperaturkontrast mod en køligere væg eller gulv. Når katten bevæger sig, skifter den mellem sensorens detektionszoner, hvilket genererer den samme slags signal, som en person ville. Signal fra en person kan være stærkere, men den grundlæggende begivenhed er identisk. Sensøren har ingen iboende koncept om størrelse eller højde. Den reagerer på ændring.
Mikrobølgesensorer bruger et andet princip, men støder på det samme problem. De udsender et kontinuerligt, lav-effekt radiofrekvenssignal og lytter efter Doppler-forskydninger i refleksionen. Ethvert objekt, der bevæger sig mod eller væk fra sensoren, vil ændre frekvensen af den reflekterede bølge. En hund, der traver over rummet, skaber en Doppler-forskydning, der er lige så målelig som en persons. Ligesom PIR’en ved mikrobølgerne kun, at noget bevæger sig, ikke hvad der bevæger sig.
Som standard er begge sensortyper designet til at være inkluderende. De er bygget til at fange nogen bevægelse, hvilket er ideelt for et alarmsystem, men katastrofalt for hjemmeautomation, der kun skal reagere på mennesker. Uden specifikke begrænsninger vil sensorerne pligtopfyldende rapportere hver eneste kæledyr, hver bevægende gardin, og endda et stort insekt, der kravler direkte over dens linse.
De udnyttelige forskelle mellem kæledyr og mennesker
Hvordan lærer vi en simpel sensor at være smartere? Vi udnytter de fysiske forskelle mellem mennesker og kæledyr.

Den første og mest pålidelige forskel er den vertikale positionering. En stående eller siddende voksen optager et højdeinterval, som en kat eller lille hund simpelthen ikke gør. Selv en stor hund på alle fire holder sin kropsvarme og masse meget lavere på jorden end en menneskestam. De fleste menneskelige bevægelser forekommer over tre fod fra gulvet; de fleste kæledyrsbevægelser er koncentreret i de laveste to fødder. Denne vertikale adskillelse er vores primære fordel.
Den anden forskel er størrelsen på varmesignaturen. En menneskekrop er en større infrarød kilde end en lille dyre, fordelt over et større vertikalt område. Det betyder, at en person typisk vil producere et stærkere og mere vedvarende signal. Denne faktor er dog mindre pålidelig end højde, fordi afstand komplicerer tingene. En kat meget tæt på sensoren kan producere et signal så stærkt som en person længere væk. Størrelse er en nyttig sekundær filter, men det kan ikke være det eneste.
Den tredje forskel, bevægelsesmønsteret, er den svageste af alle. Mennesker og kæledyr bevæger sig begge med varierende hastigheder. En person, der går på tå med nattempo, kan bevæge sig så langsomt som en kat på lur. En hund, der springer mod døren, bevæger sig hurtigere end en person, der går. Selvom nogle avancerede systemer prøver at analysere gang, er disse metoder for skrøbelige til de fleste hjem. Til vores formål er bevægelsesmønsteret ikke en pålidelig variabel.
Vertikalt synsfelt-formgivning: Ingen-zoner for teknik

Den mest effektive strategi er at skabe en konstrueret blind vinkel. Synsfelt-formgivning begrænser bevidst sensorens detektionsområde for at udelukke den vertikale zone, hvor kæledyr bor og bevæger sig. Dette er en mekanisk løsning, ikke en softwarefiltre.
En PIR-sensors Fresnel-linse er segmenteret for at fokusere infrarødt energi fra bestemte vinkler på følelegemet. Ved fysisk at maskere dele af denne linse eller ved at bruge en linse designet med bevidste dødzoner, kan vi gøre sensoren blind for den nederste del af dens synsfelt. Gulvniveauområder er blot fjernet fra detekteringsgeometrien.
En korrekt formet 'dyreimmune' sensor har en blind zone, der strækker sig fra gulvet op til cirka to og en halv fod. En kat, der går direkte under den, er usynlig; den infrarøde energi, den udsender, fokuseres aldrig på sensorens aktive zoner. Men når en person går ind i det samme område, bevæger deres torso og hoved sig gennem de aktive øverste zoner, og sensoren udløses øjeblikkeligt. Dette er ikke et sandsynligheds spil; det er en geometrisk sikkerhed. Sensoren kan ikke se gulvet, ligesom et kamera rettet mod loftet ikke kan.
Denne teknik er bemærkelsesværdigt effektiv, men den har grænser. En af dem er en meget stor hund, hvis hoved og skuldre måske netop når den nedre kant af den aktive zone. Den anden er en klatrende kæledyr. En kat, der hopper op på en køkkenbord eller bagsiden af en sofa, vil hæve sig selv ind i det aktive felt og udløse sensoren. Dette er ikke metodesvigt, men en anerkendelse af dens grænser.
Højde ved montering som grundlag
Jo højere en sensor er monteret, desto stejlere bliver dens nedadgående synsvinkel. Denne stejle vinkel komprimerer det vertikale synsfelt, hvilket effektivt hæver den nederste grænse for detektion. På seks fod kan en sensor have en blind zone på to fødder fra gulvet. Monterer man samme sensor på otte fødder, kan blindzonen strække sig næsten til tre fødder. Højde er fundamentet for kæledyrsimmunitet.
Dette er grunden til, at installationsvejledninger for kæledyrsimmune sensorer er så specifikke omkring monteringshøjden. En sensor monteret ved standardafbryders højde (omkring fire fødder) har en lav nedadgående vinkel og næsten ingen gulvblind zone. Den vil se alt. Den samme sensor monteret ved syv eller otte fødder opnår væsentlig immunitet, fordi kæledyrets varmesignatur, koncentreret nær gulvet, aldrig krydser sensorens aktive detekterings-kegle.
Bliv inspireret af Rayzeek bevægelsessensorporteføljer.
Finder du ikke det, du ønsker? Bare rolig. Der er altid alternative måder at løse dine problemer på. Måske kan en af vores porteføljer hjælpe.
Handikapet er en let reduktion i horisontal dækning, da en højt monteret sensor skaber en lille dødzon direkte under den. For de fleste rum er dette ikke et problem. I meget store rum kan det være bedre at bruge to strategisk placerede sensorer frem for én enhed ved en kompromitteret højde.
Hvis du ikke kan bore huller, så bliv kreativ. Brug en høj bogreol, en fritstående stolpe eller en beslag på et møbel for at få sensoren til den nødvendige højde. Monteringsmetoden er sekundær; højden er alt.
Følsomhedsniveauer: Den endelige indstilling
Følsomhed definerer den minimale signalstyrke, der er nødvendig for at udløse en detektion. Tænk på det som en volumenkontrol. Ved at sænke følsomheden hæves den krævede signalgrænse, hvilket betyder, at en større eller nærmere varmekilde er nødvendig for at udløse en hændelse.
Efter at have formet synsfeltet og monteringshøjden, fungerer følsomhedsjusteringen som et sidste filter. Det hjælper med at håndtere kanttilfælde, som en stor hund, hvis skulder netop strejfer den aktive zone, eller en kat, der lejlighedsvis klatrer op på et lavt bord. Ved at indstille følsomheden højt nok til at pålideligt opdage et menneske, men under tærsklen for disse mindre dyrsignal, får du en ekstra fejlmargin.
Måske er du interesseret i

- Tilstedeværelse (Auto-ON/Auto-AF)
- 12–24V DC (10–30VDC), op til 10A
- 360° dækning, 8–12 m diameter
- Tidsforsinkelse 15 s–30 min
- Lyssensor Tænd/15/25/35 Lux
- Høj/Ned sensibilitet
- Auto-ON/Auto-OFF tilstedeværelsestilstand
- 100–265V AC, 10A (har neutral)
- 360° dækkeevne; 8–12 m detekteringsdiameter
- Tidsforsinkelse 15 s–30 min; Lux FRA/15/25/35; Følsomhed Høj/Ned
- Auto-ON/Auto-OFF tilstedeværelsestilstand
- 100–265V AC, 5A (neutral nødvendig)
- 360° dækkeevne; 8–12 m detekteringsdiameter
- Tidsforsinkelse 15 s–30 min; Lux FRA/15/25/35; Følsomhed Høj/Ned

- 100V-230VAC
- Overførelsesafstand: op til 20m
- Trådløst bevægelsessensor
- Hardwired kontrol

- Spænding: 2x AAA Batterier / 5V DC (Micro USB)
- Dag/Nat Tilstand
- Tidsforsinkelse: 15min, 30min, 1h(standard), 2h

- EU-stik strømadapter

- UK-stik strømadapter
- US-stik strømadapter

- 5V DC
- Transmissionsafstand: op til 30 m
- Dag/nat-tilstand

- 5V DC
- Transmissionsafstand: op til 30 m
- Dag/nat-tilstand

- Spænding: 2 x AAA
- Transmissionsafstand: 30 m
- Tidsforsinkelse: 5s, 1m, 5m, 10m, 30m

- Belastningsstrøm: 10A Max
- Auto/Sleep-tilstand
- Tidsforsinkelse: 90s, 5min, 10min, 30min, 60min

- Belastningsstrøm: 10A Max
- Auto/Sleep-tilstand
- Tidsforsinkelse: 90s, 5min, 10min, 30min, 60min

- Belastningsstrøm: 10A Max
- Auto/Sleep-tilstand
- Tidsforsinkelse: 90s, 5min, 10min, 30min, 60min

- Belastningsstrøm: 10A Max
- Auto/Sleep-tilstand
- Tidsforsinkelse: 90s, 5min, 10min, 30min, 60min

- Belastningsstrøm: 10A Max
- Auto/Sleep-tilstand
- Tidsforsinkelse: 90s, 5min, 10min, 30min, 60min

- Belastningsstrøm: 10A Max
- Auto/Sleep-tilstand
- Tidsforsinkelse: 90s, 5min, 10min, 30min, 60min

- Tilstedeværelsestilstand
- 100V ~ 265V, 5A
- Neutral ledning påkrævet
- 1600 sq ft
- Spænding: DC 12v/24v
- Tilstand: Auto/ON/OFF
- Tidsforsinkelse: 15s~900s
- Dæmpning: 20%~100%

- Tilstedeværelse, Fravær, ON/OFF tilstand
- 100~265V, 5A
- Neutral ledning påkrævet
- Passer til UK firkantet bagdåse
At finde det perfekte punkt kræver iteration, ikke beregning. Forskellen i signalstyrke mellem en lille person i rummets kant og en stor hund nær centrum kan være snæver. Sæt den for lavt, og du vil gå glip af folk. Sæt den for højt, og hunden udløser den. Målet er at finde det punkt, hvor menneskedetektionen er pålidelig, og dyredetekter udløses i et tolerabelt, næsten nul-interval. Nogle avancerede sensorer tillader endda forskellige følsomhedsniveauer for dag og nat, hvilket strammer reglerne, når falske udløsninger er mest forstyrrende.
Hvorfor fejler kun mikrobølgeovne i små hjem
Mikrobølgesensorer markedsføres nogle gange som en overlegen løsning, teoretisk i stand til at analysere et objekts hastighed og masse ud fra dets Doppler-signatur. I et rummeligt åbent område kan dette fungere. I et lille, møbleret rum bryder fysikken sammen.
Problemet er multipath-refleksion. Sensorens signal rejser ikke blot til målet og tilbage; det reflekterer af vægge, møbler og apparater. Disse reflektioner skaber et støjende, kaotisk signalsystem. En lille bevægende kat kan synes meget større på grund af konstruktiv interference fra reflektioner, mens en person kan se mindre ud på grund af destruktiv interference. Sensorens evne til at skelne baseret på størrelse bliver fuldstændig upålidelig. I et typisk køkken eller soveværelse genererer en mikrobølgesensor ofte flere falske dyreudløsninger end en dårligt konfigureret PIR.
Dobbelt-teknologiske sensorer, der kombinerer PIR og mikrobølger og kræver, at begge er enige, før de udløses, er en langt bedre tilgang. PIR'en giver den robuste geometriske diskrimination ud fra højde- og synsfeltformning. Mikrobølgen tilføjer en sekundær bekræftelse af bevægelse. En kat på gulvet kan narre mikrobølgesensoren med forvrængede reflekser, men den vil være usynlig for PIR'ens maskede nederste felt. Da begge ikke udløses, undertrykkes alarmen, hvilket filtrerer det meste af falske positives væk.
Testopsætning med bevidst vejledning
En konfigureret sensor er en utestet hypotese. For at validere den skal du gennemgå den struktureret.
Testproceduren er enkel:
- Gå gennem dækningsområdet i et normalt tempo fra hver indgang. Bekræft, at sensoren udløses pålideligt.
- Test grænserne. Gå langsomt og i de yderste hjørner af rummet for at finde grænserne for menneskelig detektion.
- Lad dine kæledyr løbe frit. Se om deres normale ruter, især direkte under sensoren, forårsager en udløst alarm.
- Hvis det er muligt, opmuntre til at klatre. Overtal katten på sofaen eller en lav hylde for at se, om den specifikke handling skaber en falsk positiv.
- Juster og gentag. Hvis en stor hund stadig udløser sensoren, prøv at sænke følsomheden et hak eller hæve monteringshøjden med seks tommer, og kør testen igen.
Denne iterative, virkelige verdens test giver feedback, der er langt mere værdifuldt end nogen specifikationsark. Husk, at målet ikke blot er et teknisk perfekt system, men et der fungerer uden at stressede dine dyr. En opsætning, der fungerer, men gør hunden urolig for pludselige lys, er mislykket. Det sande tegn på succes er et system så veltilpasset, at dine kæledyr ikke engang ved, at det er der.