Dla wielu właścicieli zwierząt obietnica inteligentnej automatyki domu szybko zamienia się w frustrację. Światła aktywowane ruchem, mające oszczędzać energię, są zamiast tego wyzwalane przez kota przechodzącego przez pokój, cyklicznie włączając się i wyłączając przez całą noc. Zamierzona wydajność znika, zastąpiona zmarnowaną energią i ciągłym irytującym hałasem. Problem nie leży w zwierzęciu, lecz w niezdolności konwencjonalnych czujników ruchu do rozróżnienia między ludzkimi mieszkańcami a kota-tłumaczem.
Rayzeek rozwiązuje ten problem nie za pomocą złożonych algorytmów, lecz celowej geometrii soczewki. Rozwiązaniem jest pionowa granica, czyli projekt, który podnosi płaszczyznę wykrywania czujnika ponad podłogę, po której poruszają się koty i inne małe zwierzęta. Łącząc to ograniczenie geometryczne z skalibrowaną czułością, Rayzeek niezawodnie wykrywa ludzi, nie będąc jednocześnie świadomym zwierząt znajdujących się poniżej jego pola widzenia. Jego skuteczność opiera się na klarownym zrozumieniu miejsca montażu i granic wykrywania, które tworzy w typowym domu.
Dlaczego standardowe czujniki ruchu zawodzą w domach przyjaznych zwierzętom
Chociaż czujniki ruchu okazują się być skuteczne w oszczędzaniu energii w pustych pomieszczeniach, obecność zwierzęcia wprowadza zmienną, z którą standardowe rozwiązania nie radzą sobie. Kot spacerujący korytarzem rejestruje się jako ruch, co aktywuje światła. Gdy kot wraca po kilku minutach, timer zeruje się. Zamiast zmniejszać zużycie energii, ten schemat je zwiększa. Rodziny zainwestowane w automatykę, aby obniżyć koszty, okazują się, że technologia ta w rzeczywistości zwiększa marnotrawstwo.
Problem wykracza poza rachunki za energię. Automatyczne światło w sypialni, które miga za każdym razem, gdy kot się poruszy, staje się główną przyczyną zakłóceń snu. System klimatyzacji ustawiony na włączenie przy obecności ogrzewa lub chłodzi pusty pokój, w którym znajduje się tylko zwierzę. Zamierzona wygoda przeistacza się w konflikt z technologią, co skłania wielu użytkowników do wyłączenia swoich inteligentnych systemów i rezygnacji z korzyści, których szukali. Rynek od dawna oferuje czujniki ruchu, ale niewiele z nich rozwiązało podstawowe wyzwanie, jakim jest ignorowanie ruchu na podłodze na podczerwień.
Jak Standardowe Czujniki Generują Fałszywe Uruchomienia
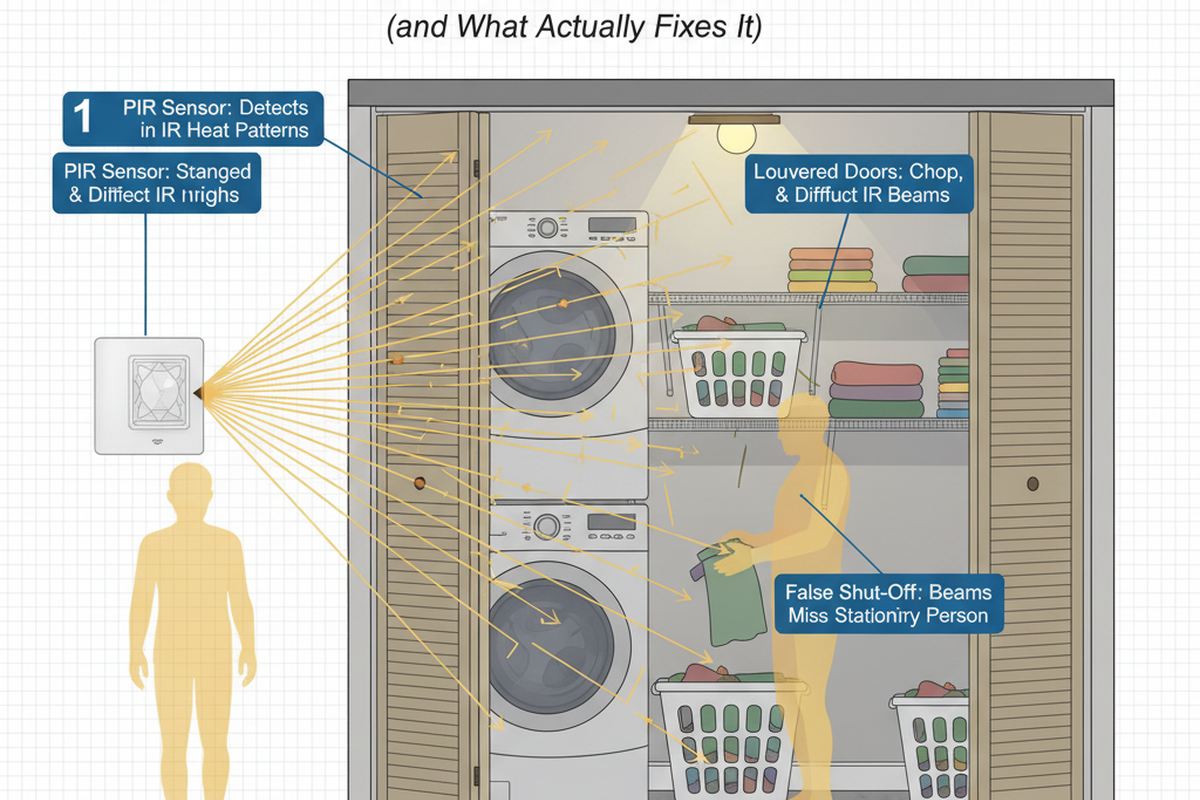
Czujniki pasywnego podczerwieni (PIR) działają poprzez wykrywanie zmian w promieniowaniu podczerwonym. Gdy jakiekolwiek ciepłe ciało — czy to osoba, czy zwierzę — porusza się w strefie wykrywania, czujnik rejestruje zmieniający się sygnał cieplny i wywołuje reakcję. Mechanizm ten jest zasadniczo nieselektywny; nie potrafi rozróżnić między człowiekiem a kotem tylko na podstawie ciepła. Kluczowym czynnikiem jest nie co porusza się, lecz gdzie to się rusza.

Większość czujników ruchu rzuca szeroki, poziomy poziom wykrywania obejmujący pomieszczenie od podłogi do sufitu, zapewniając wychwytywanie każdego ruchu człowieka. Ten projekt jest logiczny dla ogólnego wykrywania obecności, ponieważ osoba siedząca, stojąca lub chodząca przecina strefę. Jednakże to szerokie pokrycie gwarantuje, że każdy ciepły obiekt przesuwający się po podłodze wywoła alarm. Ponieważ koty, psy i inne zwierzęta żyją na poziomie podłogi, znajdują się dokładnie w tym głównym polu wykrywania. Czujnik nie zawodzi; działa dokładnie zgodnie z zamierzeniem. Niezgodność pojawia się wtedy, gdy zastosowanie wymaga selektywności, której płaszczyzna wykrywania od podłogi do sufitu nie jest w stanie zapewnić.
Pionowa granica: podnoszenie płaszczyzny wykrywania
Pionowa granica to projekt soczewki, który po prostu powstrzymuje czujnik od patrzenia w dół. Zamiast wykreślać pole wykrywania sięgające od sufitu do podłogi, soczewka fizycznie ogranicza dolną granicę swojego widzenia. Czujnik jest ustawiony pod kątem, aby widzieć na zewnątrz i nieznacznie w dół, lecz nigdy na tyle stromo, by widzieć bezpośrednio pod lub w pobliżu swojego punktu mocowania. Ruch poniżej tego progu pozostaje niewidzialny.
Soczewka osiąga to poprzez manipulację kątami promieniowania podczerwonego, które mogą dotrzeć do czujnika. Standardowy czujnik PIR używa soczewki Fresnela z segmentami obejmującymi szeroki zakres pionowy. Eliminując lub maskując dolne segmenty soczewki, projekt Rayzeek usuwa kąty skierowane w dół z pola wykrywania.
Może jesteś zainteresowany

- Obecność (Auto-WŁ/Auto-WY)
- 12–24V DC (10–30VDC), do 10A
- Zasięg 360°, średnica 8–12 m
- Opóźnienie czasowe 15 s–30 min
- Czujnik światła Wył/15/25/35 Lux
- Wysoka/Niska czułość
- Tryb zajętości Auto-ON/Auto-OFF
- 100–265V AC, 10A (neutralny wymaga się)
- Zasięg 360°; średnica wykrywania 8–12 m
- Opóźnienie czasowe 15 s–30 min; Lux OFF/15/25/35; czułość Wysoka/Niska
- Tryb zajętości Auto-ON/Auto-OFF
- 100–265V AC, 5A (wymagane neutralne)
- Zasięg 360°; średnica wykrywania 8–12 m
- Opóźnienie czasowe 15 s–30 min; Lux OFF/15/25/35; czułość Wysoka/Niska

- 100V-230V AC
- Dystans transmisji: do 20m
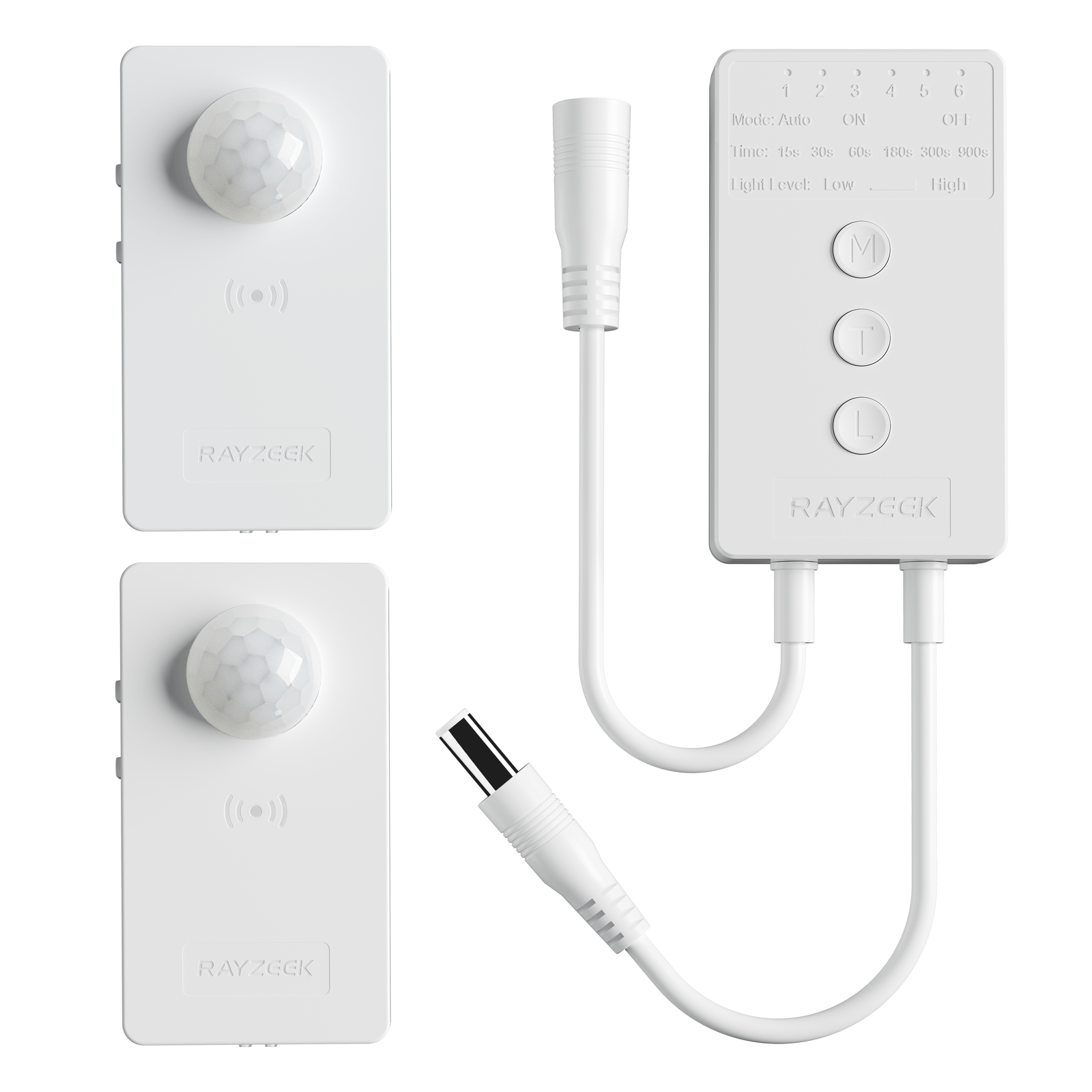
- Bezprzewodowy czujnik ruchu
- Sterowanie przewodowe

- Napięcie: 2x baterie AAA / 5V DC (Micro USB)
- Tryb dzienny/nocny
- Opóźnienie czasowe: 15min, 30min, 1h(domyślnie), 2h

- Zasilacz z wtyczką UE

- Zasilacz UK
- Zasilacz US

- 5V DC
- Odległość transmisji: do 30m
- Tryb dzień/noc

- 5V DC
- Odległość transmisji: do 30m
- Tryb dzień/noc

- Napięcie: 2 x AAA
- Odległość transmisji: 30 m
- Opóźnienie: 5s, 1m, 5m, 10m, 30m

- Prąd obciążenia: maks. 10 A
- Tryb automatyczny/uśpienia
- Opóźnienie czasowe: 90s, 5min, 10min, 30min, 60min

- Prąd obciążenia: maks. 10 A
- Tryb automatyczny/uśpienia
- Opóźnienie czasowe: 90s, 5min, 10min, 30min, 60min

- Prąd obciążenia: maks. 10 A
- Tryb automatyczny/uśpienia
- Opóźnienie czasowe: 90s, 5min, 10min, 30min, 60min

- Prąd obciążenia: maks. 10 A
- Tryb automatyczny/uśpienia
- Opóźnienie czasowe: 90s, 5min, 10min, 30min, 60min

- Prąd obciążenia: maks. 10 A
- Tryb automatyczny/uśpienia
- Opóźnienie czasowe: 90s, 5min, 10min, 30min, 60min

- Prąd obciążenia: maks. 10 A
- Tryb automatyczny/uśpienia
- Opóźnienie czasowe: 90s, 5min, 10min, 30min, 60min

- Tryb zajętości
- 100 V ~ 265 V, 5 A
- Wymagany przewód neutralny
- 1600 stóp kwadratowych
- Napięcie: DC 12v/24v
- Tryb: Auto/ON/OFF
- Opóźnienie czasowe: 15s~900s
- Ściemnianie: 20%~100%

- Tryb zajętości, pustostanu, ON/OFF
- 100~265V, 5A
- Wymagany przewód neutralny
- Pasuje do kwadratowej skrzynki tylnej UK
To tworzy podniesioną granicę wykrywania z wyraźną geometrią. Na przykład, jeśli czujnik jest zamontowany na wysokości osiem stóp, a soczewka zapobiega widzeniu więcej niż pod 30 stopni w dół od poziomu, jego płaszczyzna wykrywania nie zaczyna się przy ścianie. Zamiast tego zaczyna się kilka stóp dalej, unosząc się nad podłogą na bliskim dystansie. Bezpośrednio pod czujnikiem znajduje się pełna strefa martwa. W środkowej części pokoju, płaszczyzna może unosić się na wysokości trzech do czterech stóp od podłogi. Dopiero przy dalekiej ścianie opada w kierunku podłogi, gdy kąt się spłaszcza.
Ta geometria tworzy „bezpieczną strefę”, w której małe zwierzęta mogą poruszać się swobodnie bez wywoływania reakcji. Chodzący człowiek, którego tors jest znacznie powyżej tej płaszczyzny, będzie wykrywany niezawodnie.
Wysokość montażu i geometria strefy wykrywania

Wysokość montażu jest najważniejszą zmienną decydującą o sukcesie. Wysokość montażu ośmiu stóp nie tworzy płaszczyzny wykrywania o takiej samej wysokości; raczej wysokość tej płaszczyzny zmienia się w zależności od odległości od czujnika. Celem jest zamontowanie czujnika na tyle wysoko, aby ta unosząca się płaszczyzna pozostawała powyżej kota, ale poniżej torsu człowieka przez większość czasu w pomieszczeniu.
W domach z typowym sufitem o wysokości od ośmiu do dziewięciu stóp, montaż czujnika Rayzeek w pobliżu sufitu tworzy idealną płaszczyznę wykrywania, unoszącą się około trzech do czterech stóp nad podłogą w centrum pomieszczenia. Jest to znacznie powyżej kota, który rzadko przekracza wzrost jednego lub dwóch stóp, nawet gdy siedzi. Tors człowieka jednak łatwo przecina tę płaszczyznę.
Zasięg nie jest jednolity. Strefa martwa znajduje się bezpośrednio pod czujnikiem, podczas gdy bufor odporności na zwierzęta domowe rozciąga się na środku pomieszczenia. Na skrajach wykrywanie obniża się, ale jest to rzadki problem, ponieważ zwierzęta domowe nie unoszą się w powietrzu, a ruch człowieka wciąż jest łatwo wychwytywany. System jest najbardziej podatny w pomieszczeniach o niskich sufitach (do siedmiu stóp lub mniej), ponieważ zmniejsza to geometrę i kurczy bezpieczną strefę. W takich przypadkach montaż na maksymalnej możliwej wysokości jest niezbędny.
Zainspiruj się portfolio czujników ruchu Rayzeek.
Nie znalazłeś tego, czego szukasz? Nie martw się. Zawsze istnieją alternatywne sposoby rozwiązania problemów. Być może pomoże w tym jeden z naszych portfeli.
Regulacja czułości: Dodatkowe zabezpieczenie
Podczas gdy pionowa granica rozwiązuje problem, przestrzenny problem, regulacja czułości odnosi się do próg problem. Czułość kontroluje, jaką zmianę promieniowania podczerwonego potrzeba, aby wyzwolić sensor. Jest to silne uzupełnienie geometrii soczewki, ale nie może jej zastąpić. Poleganie wyłącznie na czułości jest błędną strategią, ponieważ termiczny sygnał dużego kota może być podobny do sygnału małego dziecka.
Kiedy system jest używany razem, staje się bardziej niezawodny. Kot, który zdoła wejść na płaszczyznę wykrywania — na przykład skacząc na meble — nadal może zostać zignorowany, jeśli czułość jest ustawiona na wyższą masę termiczną. Dla domów z tylko małymi kotami, czułość może pozostać na umiarkowanym poziomie, ponieważ pionowa granica wykonuje większość pracy. W domach z dużymi psami, które mogą wyprostować się na płaszczyźnie wykrywania, delikatne obniżenie czułości dodaje kolejną warstwę ochrony, nie komplikując wykrywania ludzi. Geometryczna soczewka jest głównym filtrem; czułość to precyzyjne wyregulowanie.
Praktyczny montaż w typowych domach
Zasady są uniwersalne, ale najlepsza pozycja montażowa zależy od układu pomieszczenia, wysokości sufitu i wzorców ruchu. Celem jest zawsze umieszczenie czujnika tam, gdzie ludzie będą niezawodnie przekraczać płaszczyznę wykrywania, podczas gdy zwierzęta domowe pozostaną pod nią.
Szukasz rozwiązań energooszczędnych aktywowanych ruchem?
Skontaktuj się z nami, aby uzyskać kompletne czujniki ruchu PIR, produkty energooszczędne aktywowane ruchem, przełączniki czujników ruchu i rozwiązania komercyjne w zakresie obecności/pobytu.
Ustawienie w rogu
Montaż czujnika w rogu blisko sufitu zapewnia najszerszy pole widzenia i najbardziej spójną pokrywę. To pozycja minimalizująca martwe strefy i zapewniająca wykrycie każdego, kto wejdzie do pomieszczenia. W typowym salonie lub sypialni czujnik zamontowany w rogu obejrzy większość niskiego mebli, choć wysokie biblioteczki mogą tworzyć martwe punkty. Wybierz róg z najbardziej widocznymi liniami widzenia do drzwi i głównych stref aktywności.
Korytarze i wąskie przestrzenie

W korytarzu najlepszym miejscem jest końcowa część, skierowana wzdłuż jego długości. Podział pionowy zapewnia, że kot może przejść cały korytarz nie będąc widzianym, podczas gdy osoba jest wykrywana natychmiast. Jeśli montaż pod sufitem jest niepraktyczny, można zamontować czujnik na wysokiej ścianie, lekko nachylony w dół, ale nie tak stromo, by widzieć podłogę z bliska.
Cały system opiera się jednak na jednej kluczowej założeniu: że zwierzęta pozostają blisko podłogi. A co z kotami, które wspinają się? Kot, który regularnie skacze na wysoką blat lub regał, może wejść w plane wykrywania. To ograniczenie każdego podejścia geometrycznego. Możesz temu zapobiec, ustawiając czujnik tak, aby unikał bezpośrednich linii widzenia do mebli, na których koty siadają, albo zmniejszając czułość. Technologia jest zoptymalizowana pod kątem normalnego zachowania zwierząt, które skupia się głównie na podłodze, a nie na domach, gdzie koty spędzają czas na wysokości ludzkiej.