Obietnica inteligentnego domu często umiera o drugiej nad ranem, gdy kot uruchamia czujnik ruchu i zalewa salon światłem. Umiera, gdy pies włóczący się po korytarzu aktywuje przełącznik przeznaczony wyłącznie dla ludzi, lub gdy zasłona poruszana przez wiatr jest mylona z obecnością. W ciągu kilku tygodni sfrustrowany właściciel albo obniża czułość czujnika, aż przestanie wykrywać prawdziwe osoby, albo całkowicie wyłącza automatyzację. Zamierzona efektywność zamienia się w uciążliwość, a drogi sprzęt stoi bezużyteczny.
To nie porażka technologii. To porażka konfiguracji. Fizyka, która pozwala czujnikowi wykrywać ruch, nie odróżnia inherentnie Owczarka niemieckiego od dorosłego człowieka. Różnice w tym, jak te dwa podmioty zajmują przestrzeń, generują ciepło i poruszają się, są jednak realne i dają się wykorzystać. Przy odpowiednim ustawieniu te różnice można zamienić w niezawodne rozróżnienie.
Rozwiązaniem nie są bardziej czułe urządzenia ani drogie kamery zasilane sztuczną inteligencją. To zdyscyplinowane zastosowanie trzech strategii mechanicznych: kształtowania pionowego pola widzenia czujnika, celowego wyboru wysokości montażu i strojenia progów czułości. Używane razem te techniki znacznie redukują fałszywe wyzwalania przez zwierzęta i przypadkowe ruchy, zachowując niezawodne wykrywanie ludzi. Wynikiem jest automatyzacja, która działa.
Problem porzucenia: gdy zwierzęta psują automatyzację
Cykl jest przygnębiająco znajomy. Nowy czujnik ruchu jest instalowany z ustawieniami fabrycznymi, często na wygodnej wysokości zamiast optymalnej. Przez kilka dni działa idealnie. Światła włączają się, gdy ktoś wchodzi do pokoju. System wydaje się inteligentny.
Potem kot zaczyna nocną patrol. Pies niespokojnie przemieszcza się z jednego miejsca do drugiego. Czujnik wyzwala, światła się zapalają, a sen zostaje zakłócony. Na początku to tylko uciążliwość. Ale przy dziesiątkach fałszywych aktywacji w tygodniu problem staje się systemowy. Właściciel walczy, obniżając czułość. To pomaga, na jakiś czas. Ale wkrótce system zaczyna pomijać rzeczywistą obecność człowieka — osobę poruszającą się powoli, wchodzącą z dziwnego kąta, albo idącą na skraju strefy wykrywania. Automatyzacja stała się niepewna w obu kierunkach.
Poddanie się to jedyna racjonalna reakcja. Obiecana wygoda stała się koniecznością konserwacji. Sprzęt zostaje na ścianie, bezczynny, podczas gdy domownicy wracają do ręcznego włączania i wyłączania. Ten wynik nie jest rzadki; to dominujący tryb awarii w systemach ruchu w domach z zwierzętami. Strata to nie tylko koszt sprzętu, ale również ciągłe marnotrawstwo energii, które system miał zapobiegać.
Jak czujniki ruchu w ogóle wykrywają cokolwiek

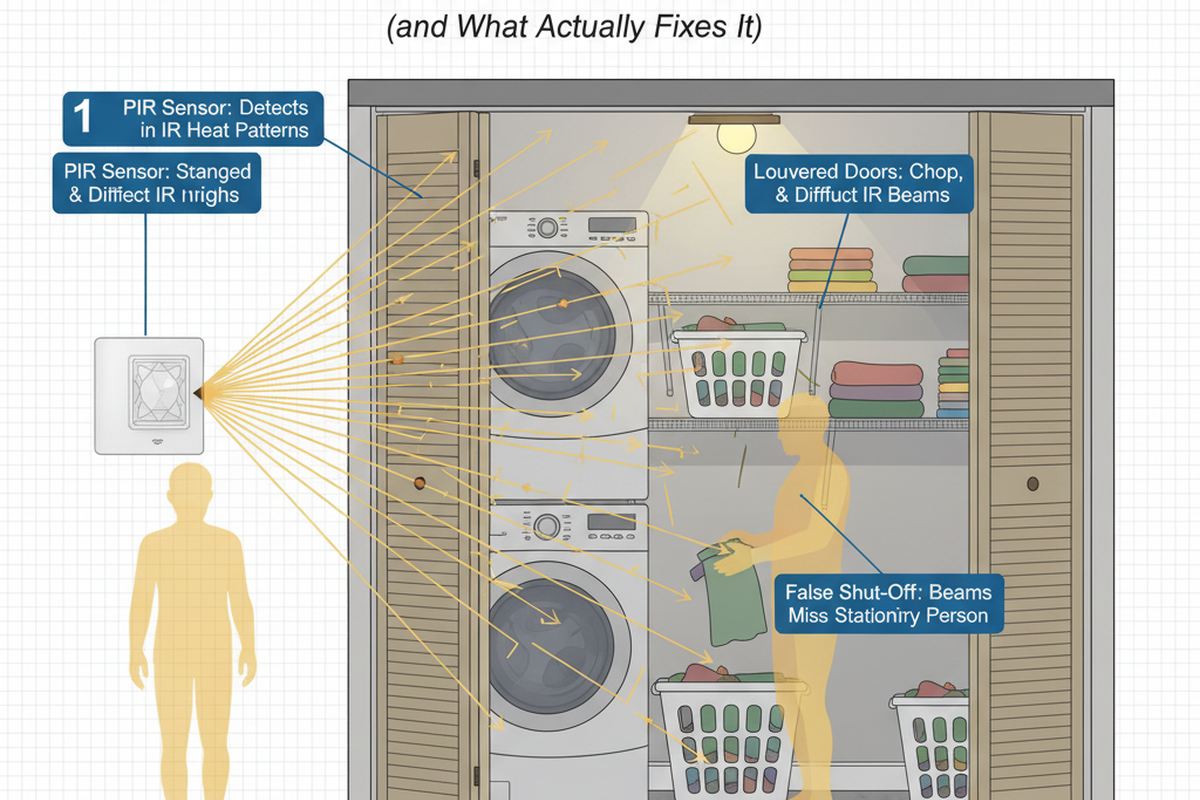
Czujniki podczerwieni pasywnej (PIR), serce automatyki domowej, są w istocie detektorami różnicy temperatur. Każdy obiekt cieplejszy od zera absolutnego emituje energię podczerwoną. Czujnik PIR wykorzystuje specjalny element piroelektryczny, zazwyczaj podzielony na dwie lub więcej stref, do pomiaru zmian w tym otoczeniu pola podczerwonego. Gdy ciepłe ciało przesuwa się z jednej strefy do drugiej, element generuje drobne różnice napięcia. Jeśli ten sygnał przekroczy ustalony próg, czujnik zgłasza wykrycie.
Szukasz rozwiązań energooszczędnych aktywowanych ruchem?
Skontaktuj się z nami, aby uzyskać kompletne czujniki ruchu PIR, produkty energooszczędne aktywowane ruchem, przełączniki czujników ruchu i rozwiązania komercyjne w zakresie obecności/pobytu.
Czujnik PIR nie 'widzi' w jakimkolwiek sensie wizualnym. Rejestruje ruch termiczny. Dlatego wykrywa kota równie łatwo jak osobę. Oba to ciepłe ciała, które tworzą kontrast temperaturowy względem chłodniejszej ściany lub podłogi. Gdy kot się porusza, przemieszcza się między strefami detekcji czujnika, generując dokładnie ten sam rodzaj sygnału, co człowiek. Sygnał od osoby może być silniejszy, ale podstawowe zdarzenie jest takie samo. Czujnik nie ma wbudowanego pojęcia rozmiaru lub wysokości. Reaguje na zmianę.
Czujniki mikrofalowe używają innej zasady, ale mają ten sam problem. Emitują ciągły, niskiej mocy sygnał radiowy i słuchają przesunięć Dopplera w odbiciu. Każdy obiekt poruszający się w kierunku lub od czujnika zmieni częstotliwość fali odbitej. Pies na przeciągnięciu po pokoju generuje przesunięcie Dopplera tak samo mierzalne jak osoba. Podobnie jak czujnik PIR, czujnik mikrofalowy wie tylko, że coś się rusza, nie wie, co się rusza.
Domyślnie oba typy czujników zostały zaprojektowane jako inkluzywne. Są zbudowane, by rejestrować którakolwiek ruch, co jest idealne dla systemu bezpieczeństwa, ale katastrofalne dla automatyzacji domu, która musi reagować wyłącznie na ludzi. Bez szczególnych ograniczeń czujnik będzie sumiennie zgłaszał każde zwierzę, każdy przesuwający się zasłonę, a nawet dużego insekta pełzającego bezpośrednio po soczewce.
Różnice dające się wykorzystać pomiędzy zwierzętami a ludźmi
Jak więc nauczyć prosty czujnik być mądrzejszym? Wykorzystujemy fizyczne różnice między ludźmi a zwierzętami.

Pierwszą i najbardziej wiarygodną różnicą jest pozycja pionowa. Stojący lub siedzący dorosły zajmuje zakres wysokości, którego kot czy mały pies po prostu nie osiąga. Nawet duży pies na czworakach utrzymuje swoją ciepłotę i masę znacznie bliżej ziemi niż tors człowieka. Większość ruchów ludzkich odbywa się powyżej trzech stóp od podłogi; większość ruchów zwierząt domowych skupia się na najniższych dwóch stopach. To pionowe rozdzielenie jest naszą główną przewagą.
Druga różnica to rozmiar sygnału cieplnego. Ciało ludzkie jest większym źródłem podczerwieni niż małe zwierzę, rozłożonym na większej powierzchni pionowej. Oznacza to, że osoba zazwyczaj wytwarza silniejszy i bardziej trwały sygnał. Ten czynnik jest jednak mniej wiarygodny niż wzrost, ponieważ odległość komplikuje sprawę. Kot bardzo blisko sensora może wytworzyć sygnał tak silny jak osoba dalej od niego. Rozmiar jest przydatnym wtórnym filtrem, ale nie może być jedynym.
Trzecia różnica, wzorzec ruchu, jest najsłabsza ze wszystkich. Ludzie i zwierzęta domowe poruszają się z różnymi prędkościami. Człowiek chodzący na palcach nocą może poruszać się tak wolno jak polujący kot. Pies pędzący do drzwi porusza się szybciej niż idący człowiek. Chociaż niektóre zaawansowane systemy próbują analizować chód, te metody są zbyt delikatne dla większości domów. Dla naszych celów, wzorzec ruchu nie jest wiarygodnym zmiennym.
Kształtowanie pionowego pola widzenia: inżynieryjne obszary martwe

Najskuteczniejszą strategią jest stworzenie inżynieryjnie zaprojektowanego martwego punktu. Kształtowanie pola widzenia celowo ogranicza obszar wykrywania sensora, aby wykluczyć pionową strefę, w której żyją i poruszają się zwierzęta domowe. To jest rozwiązanie mechaniczne, a nie filtr Softwarowy.
Soczewka Fresnela czujnika PIR jest segmentowana, aby skupiać energię podczerwieni z określonych kątów na elemencie czujnika. Maskując fizycznie części tej soczewki lub używając soczewki zaprojektowanej z zamierzonymi strefami martwymi, możemy uczynić sensor ślepym na dolną część swojego pola widzenia. Obszar na poziomie podłogi jest po prostu usunięty z geometrii detekcji.
Prawidłowo ukształtowany czujnik „odporny na zwierzęta” ma martwą strefę sięgającą od podłogi do około dwóch i pół stóp. Kot chodzący bezpośrednio pod nim jest niewidzialny; emitowana przez niego energia podczerwona nigdy nie skupia się na aktywnych strefach sensora. Jednak gdy osoba wejdzie do tego samego obszaru, jej tors i głowa przemieszczają się przez aktywne górne strefy, a sensor natychmiast wyzwala alarm. To nie jest gra probabilistyczna, to geometria pewności. Sensor nie widzi podłogi, tak jak kamera skierowana na sufit nie widzi podłogi.
Ta technika jest niezwykle skuteczna, ale ma swoje ograniczenia. Jednym z nich jest bardzo duży pies, którego głowa i ramiona mogą tylko przekroczyć dolną krawędź strefy aktywnej. Innym jest wspinające się zwierzę. Kot skaczący na blat kuchenny lub z tyłu kanapy podnosi się do strefy aktywnej i wyzwala sensor. To nie są awarie metody, lecz uznanie jej granic.
Wysokość montażu jako podstawa
Im wyżej zamontujesz sensor, tym bardziej jego kąt patrzenia w dół się zwiększa. Ten ostry kąt ścieśnia pionowe pole widzenia, skutecznie podnosząc dolną granicę wykrywania. Na sześciu stopach, sensor może mieć martwą strefę o długości dwóch stóp od podłogi. Zamontuj ten sam sensor na ośmiu stopach, a martwa strefa może się wydłużyć do prawie trzech stóp. Wysokość jest fundamentem odporności na zwierzęta.
Dlatego przewodniki montażu sensorów odpornych na zwierzęta są tak precyzyjne co do wysokości montażu. Czujnik zamontowany na standardowej wysokości włącznika (około 1,2 metra) ma płaski kąt patrzenia w dół i prawie żadnej martwej strefy od podłogi. Widzi wszystko. Ten sam czujnik zamontowany na siedmiu lub ośmiu stopach zyskuje znaczną odporność, ponieważ sygnatura cieplna zwierzęcia, skoncentrowana w pobliżu podłogi, nigdy nie przecina się z aktywnym stożkiem wykrywania sensora.
Zainspiruj się portfolio czujników ruchu Rayzeek.
Nie znalazłeś tego, czego szukasz? Nie martw się. Zawsze istnieją alternatywne sposoby rozwiązania problemów. Być może pomoże w tym jeden z naszych portfeli.
W zamian za to występuje niewielkie ograniczenie poziomego zasięgu, ponieważ czujnik zamontowany wysoko tworzy małą martwą strefę bezpośrednio pod nim. Dla większości pomieszczeń nie stanowi to problemu. W bardzo dużych przestrzeniach lepiej może być użyć dwóch strategicznie rozmieszczonych sensorów, zamiast jednego na wysokości, która jest kompromisem.
Jeśli nie możesz wiercić dziur, bądź kreatywny. Użyj wysokiej półki na książki, wolnostojącego słupa lub uchwytu na mebel, aby umieścić sensor na potrzebnej wysokości. Metoda montażu jest drugorzędna; wysokość to wszystko.
Poziomy czułości: ostateczny suwak
Czułość określa minimalną siłę sygnału potrzebną do wyzwolenia detekcji. Traktuj to jak gałkę głośności. Obniżenie czułości podnosi wymagany próg sygnału, co oznacza, że potrzebne jest większe lub bliższe źródło ciepła, aby wywołać zdarzenie.
Po wstępnym kształtowaniu pola widzenia i ustawieniu wysokości montażu, dostrajanie czułości działa jako ostateczny filtr. Pomaga radzić sobie z przypadkami brzegowymi, takimi jak duży pies, którego łopatka ledwo dotyka strefy aktywnej, lub kot, który okazjonalnie wchodzi na niskie biurko. Ustawiając czułość tak, aby niezawodnie wykrywała człowieka, ale była poniżej progu dla tych drobnych sygnałów od zwierząt, uzyskujesz dodatkową tolerancję na błędy.
Może jesteś zainteresowany

- Obecność (Auto-WŁ/Auto-WY)
- 12–24V DC (10–30VDC), do 10A
- Zasięg 360°, średnica 8–12 m
- Opóźnienie czasowe 15 s–30 min
- Czujnik światła Wył/15/25/35 Lux
- Wysoka/Niska czułość
- Tryb zajętości Auto-ON/Auto-OFF
- 100–265V AC, 10A (neutralny wymaga się)
- Zasięg 360°; średnica wykrywania 8–12 m
- Opóźnienie czasowe 15 s–30 min; Lux OFF/15/25/35; czułość Wysoka/Niska
- Tryb zajętości Auto-ON/Auto-OFF
- 100–265V AC, 5A (wymagane neutralne)
- Zasięg 360°; średnica wykrywania 8–12 m
- Opóźnienie czasowe 15 s–30 min; Lux OFF/15/25/35; czułość Wysoka/Niska

- 100V-230V AC
- Dystans transmisji: do 20m
- Bezprzewodowy czujnik ruchu
- Sterowanie przewodowe

- Napięcie: 2x baterie AAA / 5V DC (Micro USB)
- Tryb dzienny/nocny
- Opóźnienie czasowe: 15min, 30min, 1h(domyślnie), 2h

- Zasilacz z wtyczką UE

- Zasilacz UK
- Zasilacz US

- 5V DC
- Odległość transmisji: do 30m
- Tryb dzień/noc

- 5V DC
- Odległość transmisji: do 30m
- Tryb dzień/noc

- Napięcie: 2 x AAA
- Odległość transmisji: 30 m
- Opóźnienie: 5s, 1m, 5m, 10m, 30m

- Prąd obciążenia: maks. 10 A
- Tryb automatyczny/uśpienia
- Opóźnienie czasowe: 90s, 5min, 10min, 30min, 60min

- Prąd obciążenia: maks. 10 A
- Tryb automatyczny/uśpienia
- Opóźnienie czasowe: 90s, 5min, 10min, 30min, 60min

- Prąd obciążenia: maks. 10 A
- Tryb automatyczny/uśpienia
- Opóźnienie czasowe: 90s, 5min, 10min, 30min, 60min

- Prąd obciążenia: maks. 10 A
- Tryb automatyczny/uśpienia
- Opóźnienie czasowe: 90s, 5min, 10min, 30min, 60min

- Prąd obciążenia: maks. 10 A
- Tryb automatyczny/uśpienia
- Opóźnienie czasowe: 90s, 5min, 10min, 30min, 60min

- Prąd obciążenia: maks. 10 A
- Tryb automatyczny/uśpienia
- Opóźnienie czasowe: 90s, 5min, 10min, 30min, 60min

- Tryb zajętości
- 100 V ~ 265 V, 5 A
- Wymagany przewód neutralny
- 1600 stóp kwadratowych
- Napięcie: DC 12v/24v
- Tryb: Auto/ON/OFF
- Opóźnienie czasowe: 15s~900s
- Ściemnianie: 20%~100%

- Tryb zajętości, pustostanu, ON/OFF
- 100~265V, 5A
- Wymagany przewód neutralny
- Pasuje do kwadratowej skrzynki tylnej UK
Znajdowanie optymalnego punktu wymaga iteracji, a nie obliczeń. Różnica w sile sygnału między małą osobą na skraju pokoju a dużym psem w pobliżu środka może być niewielka. Ustaw ją zbyt nisko, a przeoczysz ludzi. Ustaw zbyt wysoko, a pies wyzwoli alarm. Celem jest znalezienie punktu, w którym wykrywanie ludzi jest wiarygodne, a wyzwalania zwierząt są zredukowane do akceptowalnej, prawie zerowej częstotliwości. Niektóre zaawansowane czujniki pozwalają nawet na różne poziomy czułości na dzień i noc, zaostrzając zasady, gdy fałszywe wyzwolenia są najbardziej uciążliwe.
Dlaczego mikrofalówka jako jedyne urządzenie zawodzi w małych domach
Czujniki mikrofalowe są czasami promowane jako lepsze rozwiązanie, teoretycznie zdolne do analizy prędkości i masy obiektu na podstawie jego sygnatury Dopplera. Na otwartej przestrzeni może to działać. W małym, umeblowanym pomieszczeniu fizyka zawodzi.
Problemem jest odbicie wielodrogowe. Sygnał czujnika nie podróżuje tylko do celu i z powrotem; odbija się od ścian, mebli i urządzeń. Te odbicia tworzą szumiące, chaotyczne środowisko sygnałowe. Mały, poruszający się kot może wydawać się znacznie większy z powodu wzajemnego wzmocnienia od odbić, podczas gdy osoba może wyglądać na mniejszą z powodu destrukcyjnego interferencji. Zdolność czujnika do rozróżniania na podstawie rozmiaru staje się całkowicie zawodna. W typowej kuchni lub sypialni czujnik mikrofalowy generuje częściej fałszywe wyzwolenia od zwierząt niż źle skonfigurowany PIR.
Czujniki dwutechnologiczne, które łączą PIR i mikrofalę i wymagają zgodności obu, są o wiele lepszym podejściem. PIR zapewnia solidne rozróżnianie geometryczne z powodu kształtowania wysokości i pola widzenia. Mikrofalowy dodaje drugie potwierdzenie ruchu. Kot na podłodze może oszukiwać czujnik mikrofalowy zniekształconymi odbiciami, ale będzie niewidoczny dla maskowanego dolnego pola PIR. Ponieważ oba nie wywołują alarmu, alarm jest tłumiony, filtrując większość fałszywych alarmów.
Testowa konfiguracja z celowymi ścieżkami
Skonfigurowany czujnik to niezweryfikowana hipoteza. Aby ją zatwierdzić, potrzebujesz uporządkowanego testu krok po kroku.
Procedura testowa jest prosta:
- Przejdź przez obszar objęty ochroną w normalnym tempie z każdego wejścia. Potwierdź, że czujnik wyzwala się niezawodnie.
- Przetestuj granice. Chodź powoli i na dalekich krawędziach pokoju, aby znaleźć granice wykrywania człowieka.
- Niech twoje zwierzęta swobodnie się poruszają. Obserwuj, czy ich normalne ścieżki, zwłaszcza bezpośrednio pod czujnikiem, powodują wyzwolenie.
- Jeśli to możliwe, zachęcaj do wspinaczki. Namów kota na sofę lub niską półkę, aby sprawdzić, czy konkretne działanie powoduje fałszywy alarm.
- Dostosuj i powtórz. Jeśli duży pies nadal wywołuje czujnik, spróbuj obniżyć czułość o kilka stopni lub podnieść wysokość montażu o sześć cali, a następnie powtórz test.
Ta iteracyjna, rzeczywista kontrola jest znacznie bardziej cenna niż jakakolwiek specyfikacja. Pamiętaj, że celem nie jest tylko technicznie doskonały system, lecz taki, który działa bez stresowania zwierząt. Układ, który działa, ale wywołuje niepokój psa z powodu nagłych świateł, jest nieudany. Prawdziwym znakiem sukcesu jest tak dobrze dopasowany system, że twoje zwierzęta nawet nie zdają sobie sprawy, że jest.