Löftet om ett smart hem dör ofta klockan två på morgonen, när en katt triggar en rörelsesensor och översvämmar vardagsrummet med ljus. Det dör när hunden som vandrar i hallen aktiverar en strömbrytare avsedd endast för människor, eller när ett draperi som rör sig i brisen misstas för närvaro. Inom några veckor har den frustrerade husägaren antingen sänkt sensorns känslighet tills den missar faktiska personer eller stängt av automatiseringen helt. Den avsedda effektiviteten förvandlas till ett irritationsmoment, och dyr hårdvara står oanvänd.
Det är inget fel på teknologin. Det är ett fel i konfigurationen. Fysiken som tillåter en sensor att upptäcka rörelse skiljer inte automatiskt mellan en tysk schäfer och en mänsklig vuxen. Men skillnaderna i hur dessa två ämnen upptar utrymme, genererar värme och rör sig är verkliga och exploaterbara. Med rätt inställning kan dessa skillnader omvandlas till pålitlig diskriminering.
Lösningen är inte mer känslig hårdvara eller dyra AI-driven kameror. Det är den disciplinerade tillämpningen av tre mekaniska strategier: forma sensorns vertikala synfält, medvetet välja en monteringshöjd och justera känslighetströsklar. Används tillsammans skär dessa tekniker bort falska utlösningar från husdjur och tillfällig rörelse samtidigt som de behåller pålitlig människodetektering. Resultatet är automation som fungerar.
Fallen för övergivenhet: När husdjur förstör automatiseringen
Cykeln är nedslående bekant. En ny rörelsesensor installeras med fabriksinställningar, ofta på en bekväm höjd istället för en optimal. I några dagar fungerar den perfekt. Lampor tänds när någon går in i ett rum. Systemet känns intelligent.
Sedan börjar katten sin nattliga patroll. Hunden rör sig rastlöst från en sovplats till en annan. Sensorn utlöses, ljus tänds, och sömnen störs. Till en början är det bara ett irritationsmoment. Men med dussintals falska aktiveringar i veckan blir problemet systemiskt. Husägaren kämpar tillbaka genom att sänka känsligheten. Det hjälper, ett tag. Men snart börjar systemet missa verklig mänsklig närvaro — en person som rör sig långsamt, kommer in från en konstig vinkel eller går längs kanten av detektionszonen. Automatiseringen har blivit opålitlig i båda riktningarna.
Att ge upp är det enda rationella svaret. Det utlovade bekvämligheten har blivit en underhållsuppgift. Hårdvaran förblir på väggen, orörlig, medan hushållet återgår till att slå på och av strömbrytare för hand. Detta är inte ovanligt; det är den dominerande felaktiga funktionen för rörelsestyrning i hem med husdjur. Förlusten är inte bara kostnaden för hårdvaran, utan även den fortsatta energiförlusten som systemet var tänkt att förhindra.
Hur rörelsesensorer upptäcker något alls

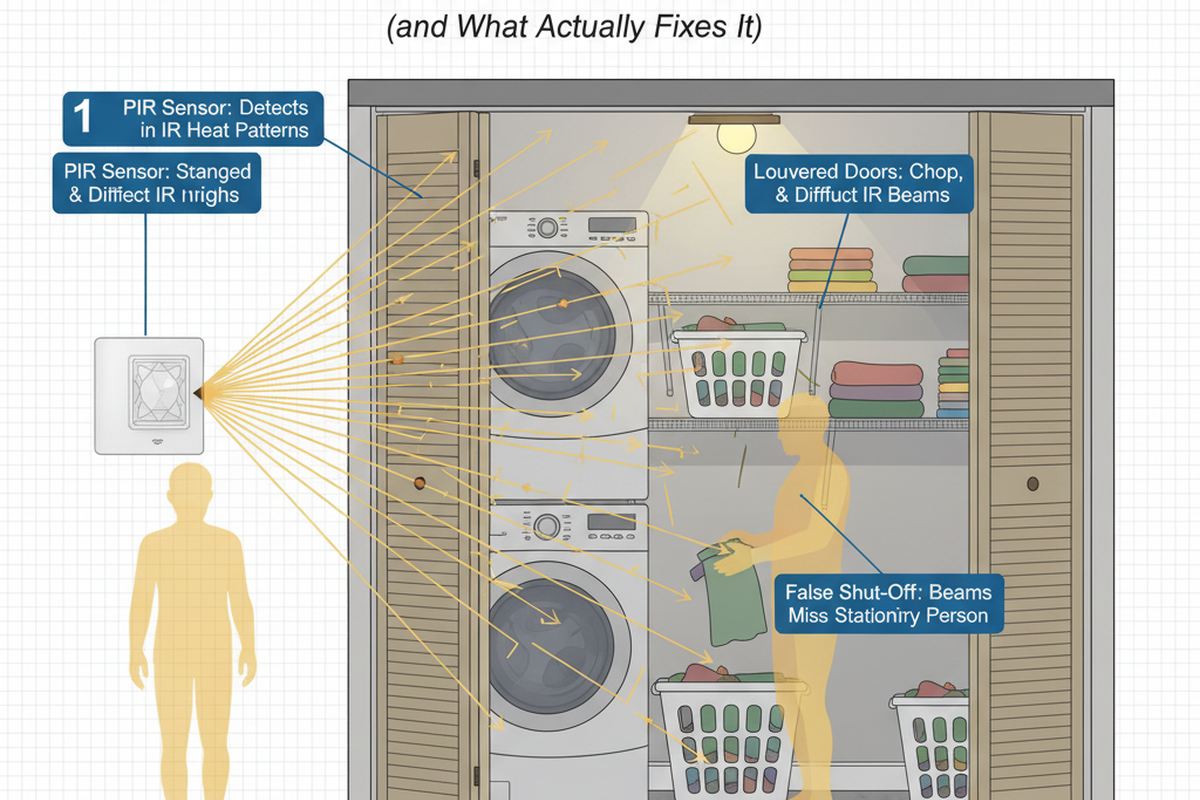
Passiva infraröda (PIR) sensorer, den armborst för bostadsautomation, är i huvudsak värme-differensdetektorer. Varje objekt varmare än absoluta nollpunkten avger infraröd energi. En PIR-sensor använder en speciell pyroelectric komponent, som vanligtvis är uppdelad i två eller fler zoner, för att mäta förändringar i detta omgivande infraröda fält. När en varm kropp flyttar sig från en zon till en annan genererar elementet en liten spänningsdifferens. Om den signalen överstiger en inställd tröskel rapporterar sensorn en detektion.
Letar du efter rörelseaktiverade energibesparande lösningar?
Kontakta oss för kompletta PIR-rörelsesensorer, rörelseaktiverade energibesparande produkter, rörelsesensorbrytare och kommersiella lösningar för närvaro/frånvaro.
En PIR-sensor “ser” inte i någon visuell mening. Den registrerar värmerörelse. Därför upptäcker den en katt lika lätt som en person. Båda är varma kroppar som skapar en temperaturkontrast mot en kallare vägg eller golv. När katten rör sig, skiftar den mellan sensorns detektionszoner, och genererar samma sorts signal som en människa skulle. Signalen från en person kan vara starkare, men den grundläggande händelsen är densamma. Sensorn har inget inneboende begrepp om storlek eller höjd. Den svarar på förändring.
Mikrovågssensorer använder en annan princip men stöter på samma problem. De sänder ut en kontinuerlig, lågströms radiofrekvenssignal och lyssnar efter Doppler-förskjutningar i reflektionen. Alla objekt som rör sig mot eller bort från sensorn kommer att förändra frekvensen av den reflekterade vågen. En hund som travar över rummet skapar en Doppler-förskjutning lika mätbar som en persons. Liksom PIR, vet mikrovågssensorn bara att något rör sig, inte vad som rör sig.
Som standard är båda sensortyperna utformade för att vara inkluderande. De är byggda för att fånga någon rörelse, vilket är idealiskt för ett säkerhetssystem men katastrofalt för hemautomation som måste svara enbart på personer. Utan specifika begränsningar kommer sensorn troget att rapportera varje husdjur, varje skiftande draperi och till och med ett stort insektsrörelse direkt över linsen.
De exploaterbara skillnaderna mellan husdjur och personer
Så hur lär vi en enkel sensor att bli smartare? Vi utnyttjar de fysiska skillnaderna mellan människor och husdjur.

Det första och mest tillförlitliga skillnaden är vertikal positionering. En stående eller sittande vuxen upptar ett höjdintervall som en katt eller liten hund helt enkelt inte gör. Även en stor hund på alla fyra håller sin kroppsvärme och massa mycket längre ner mot marken än en mänsklig bål. De flesta mänskliga rörelser sker över tre fot från golvet; de flesta husdjursrörelser är koncentrerade i de lägsta två fötterna. Denna vertikala separation är vår huvudsakliga fördel.
Den andra skillnaden är storleken på värmesignaturen. En människokropp är en större infraröd källa än ett litet djur, fördelad över ett större vertikalt område. Detta betyder att en person vanligtvis kommer att producera en starkare, mer ihållande signal. Denna faktor är dock mindre tillförlitlig än höjd, eftersom avstånd försvårar bedömningen. En katt mycket nära sensorn kan skapa en signal lika stark som en person längre bort. Storlek är en användbar sekundär filter, men den kan inte vara den enda.
Den tredje skillnaden, rörelsemönster, är den svagaste av alla. Människor och husdjur rör sig båda i varierande hastigheter. En person som går på tå på natten kan röra sig så långsamt som en katt på spaning. En hund som springer mot dörren rör sig snabbare än en person som går. Även om några avancerade system försöker analysera gångstil, är dessa metoder för sköra för de flesta hem. För våra syften är rörelsemönster inte en tillförlitlig variabel.
Vertikal synfältformning: Konstruktion av blinda zoner

Den mest effektiva strategin är att skapa ett konstruerat blindfällt. Synfältsformning begränsar avsiktligt sensorens detektionsområde för att utesluta den vertikala zon där husdjur bor och rör sig. Det är en mekanisk lösning, inte ett mjukvarufilter.
Fresnel-linsen på en PIR-sensor är segmenterad för att fokusera infraröd energi från specifika vinklar på sensing-elementet. Genom att fysiskt maskera delar av denna lins, eller använda en lins utformad med avsiktliga döda zoner, kan vi göra sensorn blind för den nedre delen av sitt synfält. Golvnivåområdet tas helt enkelt bort från detekteringsgeometrin.
En rätt formad "husdjurs-immun" sensor har en blind zon som sträcker sig från golvet till cirka två och en halv fot. En katt som går direkt under den är osynlig; den infraröda energi den avger fokuseras aldrig på sensorns aktiva zoner. Men när en person går in i samma utrymme, rör sig deras bål och huvud genom de aktiva övre zonerna, och sensorn utlöser omedelbart. Detta är inte en sannolikhetslek; det är en geometrisk säkerhet. Sensorn kan inte se golvet, precis som en kamera riktad mot taket inte kan.
Denna teknik är anmärkningsvärt effektiv, men den har begränsningar. En är en mycket stor hund, vars huvud och axlar kan just komma att överskrida den nedre kanten av den aktiva zonen. Den andra är ett klättrande husdjur. En katt som hoppar upp på ett köksbord eller soffans rygg kommer att höja sig i det aktiva fältet och utlösa sensorn. Dessa är inte metodfel, utan en erkänsla av dess gränser.
Höjd vid montering som grundpelare
Ju högre en sensor monteras, desto brantare blir dess nedåtvända vinkel. Denna branta vinkel komprimerar det vertikala synfältet, vilket effektivt höjer den nedre gränsen för detektering. Vid sex fot kan en sensor ha en blind zon på två fot från golvet. Placera samma sensor på åtta fot, och den blinda zonen kan sträcka sig till nästan tre fot. Höjd är grunden till husdjursimmunitet.
Detta är varför installationsguider för husdjursimmuna sensorer är så exakta om monteringshöjd. En sensor monterad på vanlig strömbrytarhöjd (cirka fyra fot) har en grund brant nedåt vinkel och nästan ingen golvblind zon. Den kommer att se allting. Samma sensor monterad på sju eller åtta fot får betydande immunitet eftersom husdjurs värmesignatur, koncentrerad nära golvet, aldrig skär genom sensorns aktiva detekteringskon.
Bli inspirerad av Rayzeeks portföljer för rörelsesensorer.
Hittar du inte det du vill ha? Oroa dig inte. Det finns alltid alternativa sätt att lösa dina problem. Kanske kan någon av våra portföljer hjälpa dig.
Handikappet är en lätt minskning av horisontellt täckningsområde, eftersom en högt monterad sensor skapar en liten död zon direkt under den. För de flesta rum är detta inget problem. I mycket stora utrymmen kan det vara bättre att använda två strategiskt placerade sensorer istället för en enhet på en kompromissad höjd.
Om du inte kan borra hål, var kreativ. Använd ett högt bibliotek, en fristående stång eller en fäste på en möbel för att få sensorn till den nödvändiga höjden. Monteringmetoden är sekundär; höjden är allt.
Känslighetsnivåer: Den slutgiltiga ratten
Känslighet definierar den minsta signalstyrka som krävs för att utlösa en upptäckt. Tänk på det som en volymknapp. Att sänka känsligheten höjer den nödvändiga signalnivån, vilket innebär att en större eller närmare värmekälla krävs för att utlösa en händelse.
När synfältets formning och monteringshöjd har gjort det tunga arbetet fungerar känslighetstuning som ett slutgiltigt filter. Det hjälper att hantera undantfall, som en stor hund vars axel just skrapar den aktiva zonen eller en katt som ibland klättrar upp på ett lågt bord. Genom att ställa in känsligheten tillräckligt högt för att pålitligt upptäcka en människa men under tröskeln för dessa mindre husdjursignaler får du ett extra marginalutrymme.
Du kanske är intresserad av

- Ceiling-mounted PIR occupancy sensor with dry-contact relay output
- 12/24VDC or 12/24VAC low-voltage supply
- COM, NO, and NC isolated relay contacts for EMS, HVAC, and building control inputs

- Low-voltage DC recessed ceiling-mounted microwave motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- 10A max work current with adjustable time delay, Lux threshold, and sensitivity
- Higher-load recessed ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Recessed ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Ceiling-mounted RZ037 PIR occupancy sensor dimmer for 220V power
- 3A maximum working current with 660W rated load
- LUX button controls light-sensor ON/OFF and user-set dimming brightness
- Ceiling-mounted RZ037 PIR occupancy sensor dimmer for 110V power
- 3A maximum working current with 330W rated load
- LUX button controls light-sensor ON/OFF and user-set dimming brightness

- Low-voltage DC ceiling-mounted microwave motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- 10A max work current with adjustable time delay, Lux threshold, and sensitivity
- Higher-load ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Low-voltage DC recessed ceiling mount PIR motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- Max work current 10A with adjustable time delay, Lux threshold, and sensitivity
- Higher-load recessed ceiling mount PIR motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 360-degree detection with adjustable time delay, Lux threshold, and sensitivity
- Recessed ceiling mount PIR motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 360-degree detection with adjustable time delay, Lux threshold, and sensitivity
- Wireless switch and receiver kit for indoor ON/OFF lighting control
- 100-230VAC, 50/60Hz receiver with 5A rated current
- CR2032-powered wireless switch with 2.4GHz communication
- Närvaro (Auto-ON/Auto-OFF)
- 12–24V DC (10–30VDC), upp till 10A
- 360° täckning, 8–12 m diameter
- Tidfördröjning 15 s–30 min
- Ljus sensor Av/15/25/35 Lux
- Hög/Låg känslighet
- Auto-ON/Auto-OFF närvaroläge
- 100–265V AC, 10A (neutral krävs)
- 360° täckning; detekteringsdiameter 8–12 m
- Tidsfördröjning 15 s–30 min; Lux AV/15/25/35; Känslighet Hög/Låg
- Auto-ON/Auto-OFF närvaroläge
- 100–265V AC, 5A (neutral krävs)
- 360° täckning; detekteringsdiameter 8–12 m
- Tidsfördröjning 15 s–30 min; Lux AV/15/25/35; Känslighet Hög/Låg

- 100V-230VAC
- Överföringsavstånd: upp till 20m
- Trådlös rörelsesensor
- Hårdkodad kontroll

- Spänning: 2x AAA-batterier / 5V DC (Micro USB)
- Dag/Natt-läge
- Tidsfördröjning: 15min, 30min, 1h(standard), 2h

- EU-kontakt strömadapter

- Brittisk strömadapter
Att hitta den perfekta inställningen kräver iteration, inte beräkning. Skillnaden i signalsstyrka mellan en liten person i rummets kant och en stor hund nära mitten kan vara minimal. Ställ in den för lågt, och du missar människor. Ställ den för högt, och hunden utlöser den. Målet är att hitta den punkt där mänsklig upptäckt är tillförlitlig och husdjursignaler minimeras till en tolererbar, nästan obefintlig frekvens. Vissa avancerade sensorer tillåter till och med olika känslighetsnivåer för dag och natt, vilket skärper reglerna när falska utlösningar är som mest störande.
Varför misslyckas enbart mikrovågsugn i små hem
Microsensorer marknadsförs ibland som en överlägsen lösning, teoretiskt kapabla att analysera ett objekts hastighet och massa från dess Dopplersignatur. I ett öppet utrymme kan detta fungera. I ett litet möblerat rum bryts fysiken.
Problemet är multipath-reflektion. Sensorens signal reser inte bara till målet och tillbaka; den studsar på väggar, möbler och apparater. Dessa reflektioner skapar en brusig, kaotisk signalsmiljö. En liten rörlig katt kan verka mycket större på grund av konstruktiv interferens från reflektioner, medan en person kan verka mindre på grund av destruktiv interferens. Sensorens förmåga att diskriminera baserat på storlek blir helt opålitlig. I ett typiskt kök eller sovrum genererar en enhet med endast mikrovågssensor ofta fler felaktiga husdjursutlösningar än en dåligt konfigurerad PIR.
Sensorer med dubbelteknologi, som kombinerar PIR och mikrovågor och kräver att båda är överens innan de utlöses, är ett mycket bättre tillvägagångssätt. PIR ger den robusta geometriska diskrimineringen från höjden och formning av synfältet. Mikrovågen lägger till en sekundär bekräftelse av rörelse. En katt på golvet kan lura mikrovågssensorn med förvrängda reflektioner, men den kommer att vara osynlig för PIR:s maskerade bottenfält. Eftersom båda inte utlöser, förhindras alarmet, vilket filtrerar bort majoriteten av falsklarm.
Testkonfiguration med avsiktliga vägar
En konfigurerad sensor är ett otrimmat antagande. För att validera det behöver du en strukturerad genomgång.
Testproceduren är enkel:
- Gå igenom täckningsområdet i normal takt från varje ingång. Bekräfta att sensorn utlöser pålitligt.
- Testa gränserna. Gå långsamt och vid de yttersta kanterna av rummet för att finna människans detektionsgränser.
- Låt dina husdjur ströva fritt. Titta för att se om deras vanliga vägar, särskilt direkt under sensorn, utlöser en trigging.
- Om möjligt, uppmuntra till klättring. Fäkta katten på soffan eller en låg hylla för att se om just den handlingen orsakar ett falskt positivt resultat.
- Justera och upprepa. Om en stor hund fortfarande utlöser sensorn, testa att sänka känsligheten ett steg eller höja monteringshöjden med sex tum, och kör testen igen.
Denna iteration av verklighetstester ger feedback som är mycket mer värdefull än någon specifikationsblad. Kom ihåg att målet inte bara är ett tekniskt perfekt system, utan ett som fungerar utan att stressa dina djur. En uppsättning som fungerar men gör hunden stressad av plötsliga ljus har misslyckats. Det sanna tecknet på framgång är ett så väljusterat system att dina husdjur inte ens vet att det finns.