A promessa de uma casa inteligente muitas vezes morre às duas da manhã, quando um gato aciona um sensor de movimento e inunda a sala de estar com luz. Ela morre quando o cachorro que perambula pelo corredor ativa um interruptor destinado apenas às pessoas, ou quando uma cortina balançando na brisa é confundida com ocupação. Em poucas semanas, o proprietário frustrado reduz ou desativa completamente a sensibilidade do sensor. A eficiência pretendida torna-se um incômodo, e hardware caro fica ocioso.
Isso não é uma falha da tecnologia. É uma falha na configuração. A física que permite a um sensor detectar movimento não diferencia, por si só, um pastor alemão de um adulto humano. Mas as diferenças na maneira como esses dois sujeitos ocupam o espaço, geram calor e se movem são reais e exploráveis. Com a configuração correta, essas diferenças podem ser transformadas em discriminação confiável.
A solução não é hardware mais sensível ou câmeras caras equipadas com IA. É a aplicação disciplinada de três estratégias mecânicas: moldar o campo de visão vertical do sensor, escolher deliberadamente uma altura de montagem e ajustar os limites de sensibilidade. Usadas juntas, essas técnicas reduzem os disparos falsos causados por pets e movimentos incidentais, mantendo uma detecção humana extremamente confiável. O resultado é uma automação que funciona.
O Problema do Abandono: Quando Pets Quebram a Automação
O ciclo é incrivelmente familiar. Um novo sensor de movimento é instalado com as configurações de fábrica, muitas vezes numa altura conveniente ao invés de uma altura ótima. Por alguns dias, funciona perfeitamente. As luzes acendem quando alguém entra em um cômodo. O sistema parece inteligente.
Então, o gato começa sua patrulha noturna. O cachorro se move inquietamente de um local de descanso para outro. O sensor dispara, as luzes se acendem, e o sono é perturbado. A princípio, é apenas um incômodo. Mas com dezenas de ativações falsas por semana, o problema torna-se sistêmico. O proprietário luta para reduzir a sensibilidade. Isso ajuda, por um tempo. Mas logo o sistema começa a perder presença humana real — uma pessoa que se move lentamente, entra de um ângulo estranho, ou caminha na borda da zona de detecção. A automação tornou-se pouco confiável em ambas as direções.
Desistir é a única resposta racional. A conveniência prometida tornou-se uma tarefa de manutenção. O hardware permanece na parede, imóvel, enquanto a casa volta a operar por interruptores manuais. Esse resultado não é raro; é a principal falha nos sistemas de controle de movimento em casas com pets. A perda não é apenas o custo do hardware, mas o desperdício contínuo de energia que o sistema deveria evitar.
Como os sensores de movimento detectam qualquer coisa

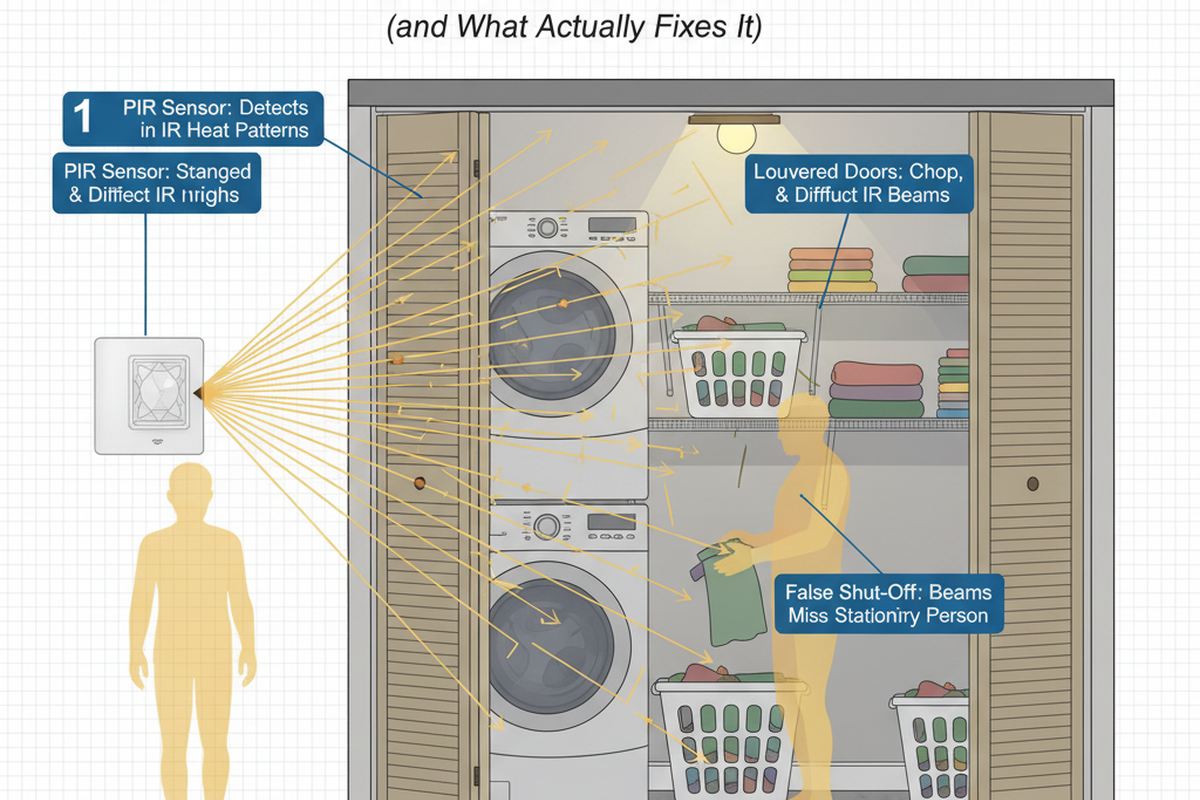
Sensores infravermelhos passivos (PIR), que são o carro-chefe da automação residencial, são essencialmente detectores de diferença de calor. Cada objeto mais quente que o zero absoluto emite energia infravermelha. Um sensor PIR usa um elemento pyroelectrico especial, geralmente dividido em duas ou mais zonas, para medir mudanças nesse campo infravermelho ambiente. Quando um corpo quente se move de uma zona para outra, o elemento gera uma pequena diferença de voltagem. Se esse sinal ultrapassar um limiar definido, o sensor registra uma detecção.
Procurando por soluções de economia de energia ativadas por movimento?
Entre em contato conosco para sensores de movimento PIR completos, produtos de economia de energia ativados por movimento, interruptores de sensor de movimento e soluções comerciais de Ocupação/Vacância.
Um sensor PIR não 'vê' no sentido visual. Ele registra movimento térmico. É por isso que detecta um gato tão facilmente quanto uma pessoa. Ambos são corpos quentes que criam um contraste de temperatura contra uma parede ou piso mais frio. À medida que o gato se move, ele troca de zonas de detecção do sensor, gerando o mesmo tipo de sinal que um humano. O sinal de uma pessoa pode ser mais forte, mas o evento fundamental éidêntico. O sensor não tem conceito inato de tamanho ou altura. Ele responde à mudança.
Sensores de micro-ondas usam um princípio diferente, mas enfrentam o mesmo problema. Emitem um sinal de radiofrequência de baixa potência contínuo e ouvem por mudanças de Doppler no reflexo. Qualquer objeto se movendo em direção ou afastando-se do sensor alterará a frequência da onda refletida. Um cachorro trotando pelo cômodo cria um desvio Doppler tão mensurável quanto o de uma pessoa. Semelhante ao PIR, o sensor de micro-ondas só sabe que algo está se movendo, não o que é.
Por padrão, ambos os tipos de sensores são projetados para serem inclusivos. Foram construídos para captar qualquer movimento, o que é ideal para um sistema de segurança, mas desastroso para automação residencial que deve responder apenas a pessoas. Sem restrições específicas, o sensor irá diligentemente relatar cada pet, cada cortina que se move, e até mesmo um inseto grande rastejando diretamente pela lente.
As Diferenças Exploitatíveis Entre Pets e Pessoas
Então, como ensinamos a um sensor simples a ser mais inteligente? Exploramos as diferenças físicas entre pessoas e pets.

A primeira e mais confiável diferença é o posicionamento vertical. Um adulto em pé ou sentado ocupa uma faixa de altura que um gato ou um cachorro pequeno simplesmente não possui. Mesmo um cachorro grande de quatro patas mantém seu calor corporal e volume muito mais baixo em relação ao chão do que um tronco humano. A maior parte do movimento humano ocorre acima de três pés do chão; a maior parte do movimento de animais de estimação está concentrada nos dois pés mais baixos. Essa separação vertical é nossa principal vantagem.
A segunda diferença é o tamanho da assinatura térmica. Um corpo humano é uma fonte maior de infravermelho do que um animal pequeno, distribuída sobre uma área vertical maior. Isso significa que uma pessoa geralmente produzirá um sinal mais forte e sustentado. No entanto, esse fator é menos confiável do que a altura, porque a distância complica as coisas. Um gato muito próximo ao sensor pode produzir um sinal tão forte quanto uma pessoa mais distante. O tamanho é um filtro secundário útil, mas não pode ser o único.
A terceira diferença, o padrão de movimento, é a mais fraca de todas. Pessoas e animais de estimação se movem em velocidades variáveis. Uma pessoa de ponta de pé à noite pode se mover tão lentamente quanto um gato à espreita. Um cachorro correndo em direção à porta se move mais rápido do que uma pessoa andando. Embora alguns sistemas avançados tentem analisar o passo, esses métodos são muito frágeis para a maioria das casas. Para nossos propósitos, o padrão de movimento não é uma variável confiável.
Modelagem do Campo de Visão Vertical: Zoneamento de áreas cegas

A estratégia mais eficiente é criar um ponto cego projetado. A modelagem do campo de visão restringe deliberadamente a área de detecção do sensor para excluir a zona vertical onde os animais de estimação vivem e se movem. Esta é uma solução mecânica, não um filtro de software.
A lente de Fresnel de um sensor PIR é segmentada para focar energia infravermelha de ângulos específicos no elemento sensorial. Ao mascarar fisicamente partes desta lente, ou ao usar uma lente projetada com zonas mortas intencionais, podemos tornar o sensor cego para a porção inferior do seu campo de visão. A área ao nível do chão é simplesmente removida da geometria de detecção.
Um sensor 'imune a animais de estimação' corretamente moldado tem uma zona cega que vai do chão até cerca de dois metros e meio. Um gato que passa por baixo dele é invisível; a energia infravermelha que ele emite nunca é focada nas zonas ativas do sensor. Mas, quando uma pessoa entra no mesmo espaço, seu tronco e cabeça passam pelas zonas superiores ativas, e o sensor é acionado instantaneamente. Não é um jogo de probabilidade; é uma certeza geométrica. O sensor não consegue ver o chão, assim como uma câmera apontada para o teto não consegue.
Essa técnica é extremamente eficaz, mas tem limites. Um cão muito grande, cuja cabeça e ombros podem ultrapassar a borda inferior da zona ativa. Outro limite é um animal de estimação que escala. Um gato que pula em uma bancada ou no encosto de um sofá se eleva na zona ativa e aciona o sensor. Essas não são falhas do método, mas o reconhecimento de suas fronteiras.
Altura de instalação como base
Quanto mais alto um sensor é montado, mais íngreme se torna o seu ângulo de visão para baixo. Esse ângulo acentuado comprime o campo de visão vertical, elevando efetivamente a borda inferior da detecção. A seis pés, um sensor pode ter uma zona cega de dois pés do chão. Monte esse mesmo sensor a oito pés, e a zona cega pode se estender por quase três pés. A altura é a base da imunidade ao animal de estimação.
Por isso, os guias de instalação de sensores imunes a animais de estimação são tão específicos sobre a altura de montagem. Um sensor montado na altura padrão de interruptor (cerca de quatro pés) tem um ângulo de descida raso e quase nenhuma zona cega no chão. Ele verá tudo. O mesmo sensor montado a sete ou oito pés ganha imunidade significativa porque a assinatura térmica do animal de estimação, concentrada próximo ao chão, nunca intersecta o cone de detecção ativa do sensor.
Inspire-se com os Portfólios de Sensores de Movimento Rayzeek.
Não encontrou o que deseja? Não se preocupe. Sempre há maneiras alternativas de resolver seus problemas. Talvez um de nossos portfólios possa ajudar.
A compensação é uma ligeira redução na cobertura horizontal, pois um sensor montado em altura elevada cria uma pequena zona morta diretamente abaixo dele. Para a maioria dos ambientes, isso não é um problema. Em espaços muito grandes, pode ser melhor usar dois sensores estrategicamente posicionados do que um único em uma altura comprometida.
Se você não consegue perfurar buracos, seja criativo. Use uma estante alta, um poste de apoio ou um suporte em um móvel para colocar o sensor na elevação necessária. O método de montagem é secundário; a altura é tudo.
Níveis de sensibilidade: o ajuste final
A sensibilidade define a intensidade mínima do sinal necessário para disparar uma detecção. Pense nisso como um controle de volume. Reduzir a sensibilidade aumenta o limiar de sinal necessário, ou seja, uma fonte de calor maior ou mais próxima é necessária para disparar um evento.
Depois que a modelagem do campo de visão e a altura de montagem fizeram o trabalho pesado, o ajuste de sensibilidade atua como um filtro final. Ele ajuda a gerenciar casos extremos, como um cachorro grande cuja o ombro apenas toca a zona ativa ou um gato que ocasionalmente sobe em uma mesa baixa. Ao definir a sensibilidade alta o suficiente para detectar com confiança um humano, mas abaixo do limiar para esses sinais menores de pets, você ganha uma margem adicional de erro.
Talvez Você Esteja Interessado Em

- Ocupação (Auto-LIGAR/Auto-DESLIGAR)
- 12–24V DC (10–30VDC), até 10A
- Cobertura de 360°, diâmetro de 8–12 m
- Atraso de tempo 15 s–30 min
- Sensor de luz Desligado/15/25/35 Lux
- Sensibilidade Alta/Baixa
- Modo de ocupação Auto-ON/Auto-OFF
- 100–265V CA, 10A (neutro necessário)
- Cobertura de 360°; diâmetro de detecção de 8–12 m
- Retraso de tempo 15 s–30 min; Lux DESL/15/25/35; Sensibilidade Alta/Baixa
- Modo de ocupação Auto-ON/Auto-OFF
- 100–265V CA, 5A (neutro necessário)
- Cobertura de 360°; diâmetro de detecção de 8–12 m
- Retraso de tempo 15 s–30 min; Lux DESL/15/25/35; Sensibilidade Alta/Baixa

- 100V-230VAC
- Distância de Transmissão: até 20m
- Sensor de movimento sem fio
- Controle cabeado

- Tensão: 2x Pilhas AAA / 5V DC (Micro USB)
- Modo Dia/Noite
- Atraso de tempo: 15min, 30min, 1h(padrão), 2h

- Adaptador de energia com plugue EU

- Adaptador de energia com plugue UK
- Adaptador de energia com plugue US

- 5V DC
- Distância de Transmissão: até 30m
- Modo Dia/Noite

- 5V DC
- Distância de Transmissão: até 30m
- Modo Dia/Noite

- Tensão: 2 x AAA
- Distância de Transmissão: 30 m
- Atraso de tempo: 5s, 1m, 5m, 10m, 30m

- Corrente de Carga: Máx. 10A
- Modo Automático/Modo de Espera
- Atraso de tempo: 90s, 5min, 10min, 30min, 60min

- Corrente de Carga: Máx. 10A
- Modo Automático/Modo de Espera
- Atraso de tempo: 90s, 5min, 10min, 30min, 60min

- Corrente de Carga: Máx. 10A
- Modo Automático/Modo de Espera
- Atraso de tempo: 90s, 5min, 10min, 30min, 60min

- Corrente de Carga: Máx. 10A
- Modo Automático/Modo de Espera
- Atraso de tempo: 90s, 5min, 10min, 30min, 60min

- Corrente de Carga: Máx. 10A
- Modo Automático/Modo de Espera
- Atraso de tempo: 90s, 5min, 10min, 30min, 60min

- Corrente de Carga: Máx. 10A
- Modo Automático/Modo de Espera
- Atraso de tempo: 90s, 5min, 10min, 30min, 60min

- Modo de Ocupação
- 100V ~ 265V, 5A
- Necessário Fio Neutro
- 1600 pés quadrados
- Tensão: DC 12v/24v
- Modo: Automático/ON/OFF
- Atraso de Tempo: 15s~900s
- Escurecimento: 20%~100%

- Modo de Ocupação, Vaga, ON/OFF
- 100~265V, 5A
- Necessário Fio Neutro
- Compatível com caixa de parede quadrada do Reino Unido
Encontrar o ponto ideal requer iteração, não cálculo. A diferença na força do sinal entre uma pessoa pequena na borda da sala e um cachorro grande próximo ao centro pode ser sutil. Defina-a muito baixa e você perderá pessoas. Defina-a muito alta e o cachorro ativará. O objetivo é encontrar o ponto em que a detecção de humanos seja confiável e as ativações por pets sejam reduzidas a uma frequência quase zero. Alguns sensores avançados até permitem níveis diferentes de sensibilidade para dia e noite, ajustando as regras quando falsas ativações são mais disruptivas.
Por que Falha Apenas com Micro-ondas em Pequenas Casas
Sensores de micro-ondas às vezes são comercializados como uma solução superior, teoricamente capazes de analisar a velocidade e a massa de um objeto pelo seu assinatura Doppler. Em um espaço amplo, isso pode funcionar. Em uma sala pequena e mobiliada, a física falha.
O problema é a reflexão multipath. O sinal do sensor não viaja apenas até o alvo e volta; ele ricocheteia nas paredes, móveis e eletrodomésticos. Essas reflexões criam um ambiente de sinais barulhentos e caóticos. Um gato pequeno em movimento pode parecer muito maior devido à interferência construtiva das reflexões, enquanto uma pessoa pode parecer menor por interferência destrutiva. A capacidade do sensor de discriminar com base no tamanho torna-se completamente irrrelevante. Em uma cozinha ou quarto comum, um sensor apenas de micro-ondas muitas vezes gera mais falsas ativações por pets do que um PIR mal configurado.
Sensores de tecnologia dupla, que combinam PIR e micro-ondas e exigem que ambos concordem antes de disparar, são uma abordagem muito melhor. O PIR fornece a discriminação geométrica robusta baseada na altura e modelagem do campo de visão. A micro-ondas acrescenta uma confirmação secundária de movimento. Um gato no chão pode iludir o sensor de micro-ondas com reflexões distorcidas, mas será invisível ao campo inferior mascarado do PIR. Como ambos não disparam, o alarme é suprimido, filtrando a maioria dos falsos positivos.
Configuração de teste com caminhos intencionais
Um sensor configurado é uma hipótese não testada. Para validá-lo, você precisa de uma análise estruturada.
O procedimento de teste é simples:
- Percorra a área de cobertura em um ritmo normal de entrada em cada acesso. Confirme se o sensor dispara de forma confiável.
- Teste as fronteiras. Caminhe lentamente e nas bordas mais distantes da sala para descobrir os limites de detecção de humanos.
- Deixe seus pets circularem livremente. Observe se seus caminhos normais, especialmente diretamente sob o sensor, causam uma ativação.
- Se possível, incentive a escalada. Convoque o gato para o sofá ou uma prateleira baixa para ver se essa ação específica gera um falso positivo.
- Ajuste e repita. Se um cachorro grande ainda ativar o sensor, tente diminuir a sensibilidade em um nível ou aumentar a altura de montagem em seis polegadas, e execute o teste novamente.
Este teste iterativo no mundo real fornece um feedback muito mais valioso do que qualquer ficha técnica. Lembre-se de que o objetivo não é apenas um sistema tecnicamente perfeito, mas um que funcione sem estressar seus animais. Uma configuração que funciona, mas deixa o cachorro ansioso com luzes repentinas, falhou. A verdadeira marca de sucesso é um sistema tão bem ajustado que seus pets nem percebem que está lá.