
多くのペットオーナーにとって、スマートホーム自動化の約束はすぐにフラストレーションに変わる。エネルギー節約のために設計されたモーションアクティブライトは、代わりに部屋を横断する猫によってトリガーされ、一晩中点灯と消灯を繰り返す。本来の効率性は消え失せ、無駄な電力と絶え間ない迷惑だけが残る。問題はペットではなく、従来のモーションセンサーが人間と猫の交通を区別できないことにある。
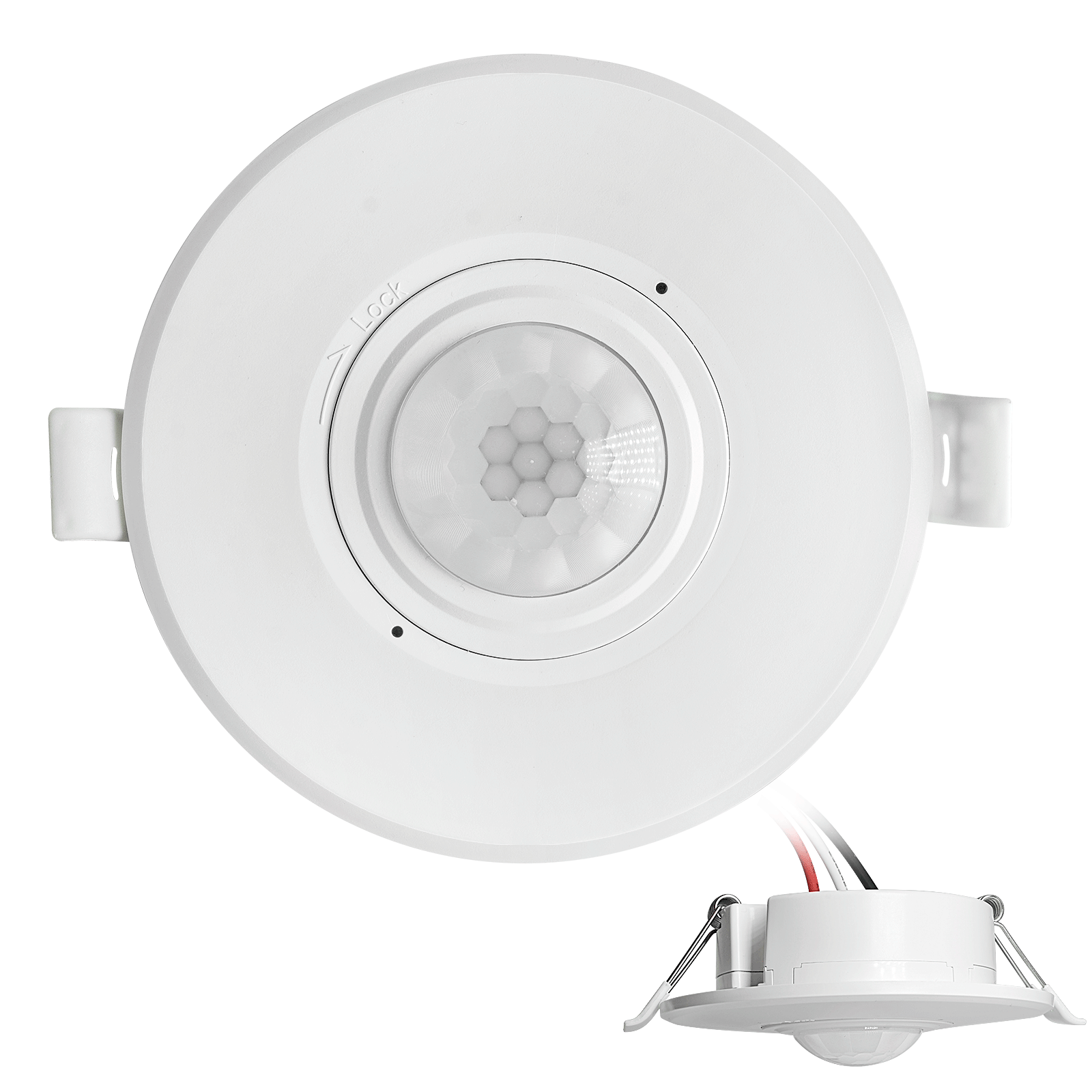
Rayzeekはこの問題を複雑なアルゴリズムではなく、意図的なレンズの形状で解決している。その解決策は垂直カットオフであり、センサーの検知面を床の上に高く持ち上げ、小さなペットが動き回る場所に設置される。この幾何学的制約と較正された感度を組み合わせることで、Rayzeekは人間を確実に検知し、視野内のペットには全く気付かない状態を保つ。その効果は設置位置と一般的な家庭での検知境界線を明確に理解していることに依存している。
ペットと暮らす家で標準的な動きセンサーが失敗する理由
モーションセンサーは空室のエネルギー節約に効果的である一方、ペットがいると標準的な設計では対応できない変数を導入する。廊下を歩く猫は動きとして認識されてライトが点灯し、猫が数分後に戻るとタイマーがリセットされる。このパターンはエネルギー消費の削減にはつながらず、むしろ増加させる。コスト削減のために自動化に投資した家庭は、実際には無駄を増やしていることが多い。
この問題はエネルギー請求だけにとどまらない。猫の動きに合わせて点灯する自動化された寝室のライトは、大きな睡眠の妨げとなる。占有に合わせて稼働する気候制御システムは、ペットだけがいる空の部屋を暖めたり冷やしたりする。本来の便利さはテクノロジーとの敵対関係となり、多くのユーザーはスマートシステムを完全に無効にし、求めていた利益を失う。市場には長い間モーションセンサーが提供されてきたが、床面レベルの赤外線動きを無視する本質的な課題を解決しているものは少ない。
標準センサーが誤作動を引き起こす仕組み
パッシブ赤外線(PIR)センサーは、赤外線放射の変化を検出することで動作する。暖かい物体—人間やペットを問わず—が検知ゾーンを横断すると、センサーは熱のシグネチャの変化を感知し、反応を引き起こす。この仕組みは本質的に無差別であり、熱だけを基準にして人間と猫を区別できない。重要なのは 何 動きますが どこ それが動く場所。

多くのモーションセンサーは広く水平な検知面を持ち、部屋全体を床から天井までカバーし、あらゆる人の動きを捉える。この設計は、座っている、立っている、歩いているなどの人物の動きと交差するため、一般的な占有検知には理にかなっている。しかし、この広範なカバレッジは、床を横断する暖かい物体を検知して警報を発することも保証している。猫や犬などのペットは地面レベルで暮らすため、主要な検知範囲内に完全に存在している。センサーは故障しているのではなく、設計通りに動作している。ミスマッチは、アプリケーションが床から天井までの検知面による選択性を要求する場合に生じる。
垂直カットオフ:検知面を高める
垂直カットオフは、センサーの下向きの視界を停止させるレンズ設計である。天井から床までの検知範囲を放射するのではなく、レンズは物理的に視界の下限を制限する。センサーは外側とやや下向きに角度が付けられているが、設置位置のすぐ下や近くの床を見るほど急角度ではない。下方の動きは見えないままである。
レンズは赤外線のどの角度がセンサーに到達できるかを操作することでこれを実現している。標準的なPIRセンサーは、広範囲の垂直範囲をカバーするフレネルレンズを使用している。下向きのレンズ部分を排除またはマスキングすることで、Rayzeekの設計は検知範囲から下向きの角度を取り除いている。
多分、あなたは興味がある

- Ceiling-mounted PIR occupancy sensor with dry-contact relay output
- 12/24VDC or 12/24VAC low-voltage supply
- COM, NO, and NC isolated relay contacts for EMS, HVAC, and building control inputs

- Low-voltage DC recessed ceiling-mounted microwave motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- 10A max work current with adjustable time delay, Lux threshold, and sensitivity
- Higher-load recessed ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Recessed ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Ceiling-mounted RZ037 PIR occupancy sensor dimmer for 220V power
- 3A maximum working current with 660W rated load
- LUX button controls light-sensor ON/OFF and user-set dimming brightness
- Ceiling-mounted RZ037 PIR occupancy sensor dimmer for 110V power
- 3A maximum working current with 330W rated load
- LUX button controls light-sensor ON/OFF and user-set dimming brightness

- Low-voltage DC ceiling-mounted microwave motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- 10A max work current with adjustable time delay, Lux threshold, and sensitivity
- Higher-load ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Low-voltage DC recessed ceiling mount PIR motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- Max work current 10A with adjustable time delay, Lux threshold, and sensitivity
- Higher-load recessed ceiling mount PIR motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 360-degree detection with adjustable time delay, Lux threshold, and sensitivity
- Recessed ceiling mount PIR motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 360-degree detection with adjustable time delay, Lux threshold, and sensitivity
- Wireless switch and receiver kit for indoor ON/OFF lighting control
- 100-230VAC, 50/60Hz receiver with 5A rated current
- CR2032-powered wireless switch with 2.4GHz communication
- 占有(オートオン/オートオフ)
- 12–24V DC(10–30VDC)、最大10A
- 360°カバレッジ、8–12m直径
- 遅延時間 15秒~30分
- 光センサー オフ/15/25/35ルクス
- 高/低感度
- 自動ON/自動OFF占有モード
- 100–265V AC、10A(ニュートラル必要)
- 360°カバレッジ; 検出直径8–12 m
- タイム遅延15秒〜30分; Lux OFF/15/25/35; 感度 高/低
- 自動ON/自動OFF占有モード
- 100–265V AC、5A(中性線必要)
- 360°カバレッジ; 検出直径8–12 m
- タイム遅延15秒〜30分; Lux OFF/15/25/35; 感度 高/低

- 100V-230VAC
- 送信距離:最大20m
- ワイヤレスモーションセンサー
- 配線制御

- 電圧:単4電池2本 / 5V DC (Micro USB)
- デイ/ナイト・モード
- 遅延時間15分、30分、1時間(デフォルト)、2時間

- EUプラグ電源アダプタ

- イギリスのプラグ電源アダプタ
これは、鮮明なジオメトリを持つ高い検出境界を作り出します。例えば、センサーが8フィートの高さに取り付けられ、レンズが水平線よりも30度以下を見ることを防ぐ場合、その検出面は壁から始まるのではなく、数フィート外側に浮かび上がり、床上の近距離で浮いています。センサーの真下には完全な死角があります。部屋の中央では、その平面は地上から3~4フィートの位置に浮かんでいる可能性があります。最も遠い壁でのみ、その平面が床に向かって下降します。
このジオメトリは、小さな動物が反応を引き起こさずに自由に動き回れる「安全ゾーン」を作り出します。体幹がこの平面よりも上にある歩行者は、確実に検知されます。
取り付け高さと検出ゾーンのジオメトリ

取り付け高さは成功のための最も重要な変数です。8フィートの取り付け高さは、8フィートの高さの検出面を作り出すわけではありません。むしろ、面の高さはセンサーからの距離によって変動します。目標は、センサーを十分に高く取り付けて、この浮遊面が猫の上にあり、人間の体幹の下に留まるようにすることです。
標準的な8~9フィートの天井がある住宅では、レイジークセンサーを天井近くに取り付けると、理想的な検出面が作られ、その面は部屋の中央で床からおよそ3~4フィートの高さに浮かんでいます。これは、座っている場合でも頭の高さが一、二フィートを超えることはほとんどない猫よりもはるかに高いです。ただし、人間の体幹は容易にこの平面と交差します。
カバレッジは均一ではありません。死角はセンサーの直下にあり、ペット免疫バッファーは部屋の中央にあります。端の方では検出面が低くなりますが、ペットは浮遊しないため、ほとんど問題になりませんし、人の動きも容易に捉えられます。システムは天井が低い(7フィート以下)スペースでは最も脆弱です。これはジオメトリを圧縮し、安全ゾーンを縮小させるためです。そのような場合は、最大限の高さに取り付けることが不可欠です。
Rayzeekモーションセンサーのポートフォリオからインスピレーションを得る。
欲しいものが見つからない?ご心配なく。あなたの問題を解決する別の方法はいつでもあります。私たちのポートフォリオがお役に立てるかもしれません。
感度調整:セーフガードの二次手段
垂直カットオフは問題の 空間的 問題を解決し、感度調整は 閾値 問題を解決します。感度は、信号が閾値を超えるために必要な赤外線の変化の量を制御します。これはレンズジオメトリを補完する強力な手段ですが、置き換えることはできません。感度だけに頼る戦略は誤りであり、大きな猫の熱署名は小さな子供のそれに似ている場合があります。
共に使用すれば、システムはより堅牢になります。検出平面に入り込もうとする猫—例えば家具の上にジャンプした場合でも—感度が大きな熱質量に合わせて調整されていれば無視できます。小さな猫のみの場合、感度は中程度に設定できます。このとき垂直カットオフがほとんどの作業を担います。大きな犬が検出面に突入する恐れがある場合でも、感度を少し下げるだけで、人的検出を損なわずにもうひとつの層の保護が追加されます。ジオメトリックなレンズが主要なフィルターであり、感度は微調整に過ぎません。
実用的な取り付け方法:標準的な住宅における応用
原則は普遍的ですが、最適な取り付け位置は部屋のレイアウト、天井の高さ、交通パターンによって異なります。目的は常に、人やペットが確実に検出平面を横切る場所にセンサーを設置し、ペットはその下に残るようにすることです。
モーションアクティベート省エネソリューションをお探しですか?
PIRモーションセンサ、モーションアクティベート省エネ製品、モーションセンサスイッチ、Occupancy/Vacancy商用ソリューションについては、弊社までお問い合わせください。
コーナー取り付け
天井近くのコーナーにセンサーを設置すると、視野が最も広く、最も一貫したカバレッジを得られます。この位置はデッドゾーンを最小限に抑え、部屋に入る人を確実に検出します。一般的なリビングルームや寝室では、コーナーに取り付けられたセンサーはほとんどの低い家具を超えて視認できますが、高い本棚は死角を作ることがあります。ドアの通路や主要な活動エリアの見通しが最も良いコーナーを選びましょう。
廊下や狭い空間

廊下では、最良の配置は一端に設置し、その長さに向けて向けることです。垂直カットオフにより、猫が通路全体を歩き回っても見えず、人はすぐに検出されます。天井取り付けが難しい場合は、高い壁に取り付けることもでき、やや下向きに角度をつけますが、床を間近に見えるほど急な角度ではありません。
しかし、システム全体は一つの重要な前提に依存しています:ペットは床の近くにいるということです。登る猫はどうでしょうか?高いカウンタートップや本棚に日常的にジャンプする猫は、検出平面に入り込む可能性があります。これはどんな幾何学的アプローチにも制限があります。これを軽減するには、猫が止まる家具への直接の見通しを避けるようにセンサーを配置するか、感度を下げることです。この技術は、通常のペット行動を最適化しています。これは圧倒的に床に中心を置いていますが、人間の高さで活動する猫が多い家庭には適していません。







