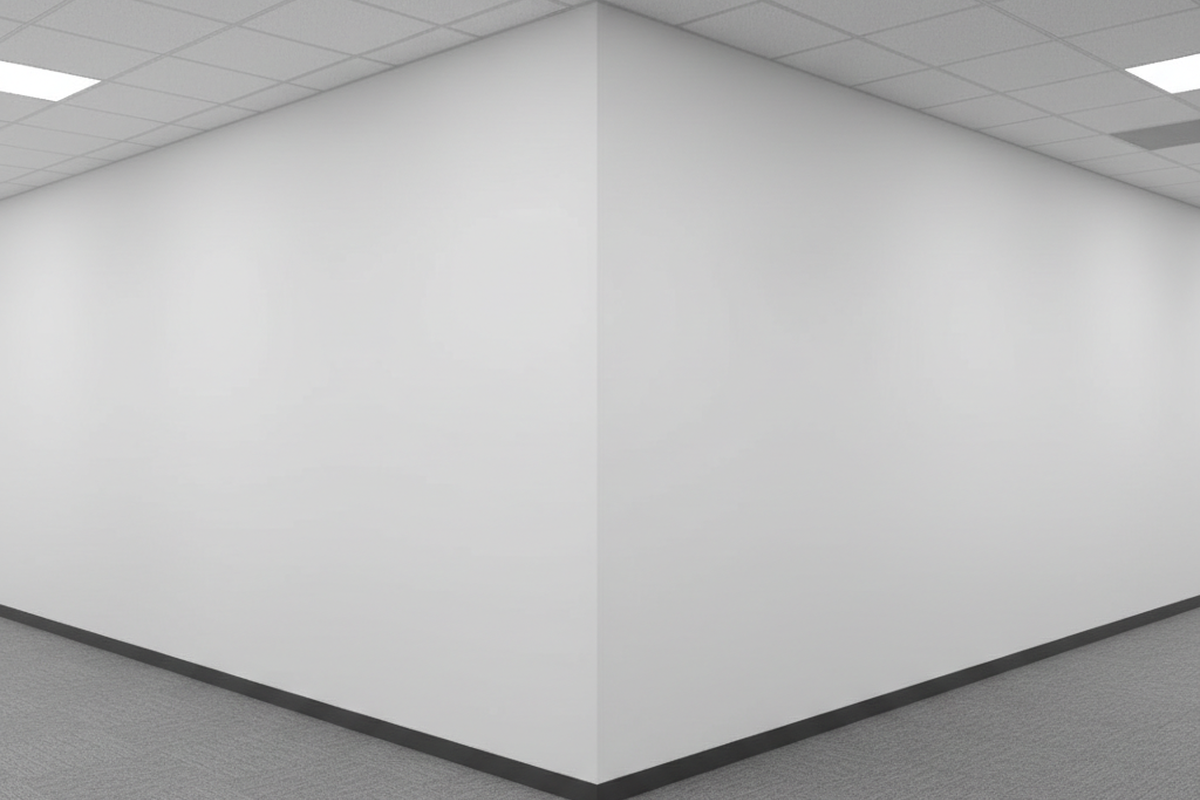
商業用のレトロフィットでは、L字型の廊下は「十分に良い」センサー配置の墓場です。これは、標準的な設置して放置する戦術が一貫して失敗するシナリオであり、通常は休憩室までの途中で暗闇に突入した誰かが慌てて手を振る事態を招きます。
一般的な誤解は、360度の視野と広大な検出半径を持つ高性能センサーが単に角の近くに置かれ、廊下の両方の脚をカバーできるというものです。その誤解は高くつきます。呼び戻しや「幽霊が出る」ライトへの苦情、そして最終的には施設管理者がシステムの完全撤去を要求する事態を招きます。
ここでの失敗は、ハードウェア自体の欠陥であることはほとんどありません。Rayzeekの天井取り付け型や同様の商業用PIR(受動赤外線)センサーは、物理法則が示す通りに正確に動作します。問題は、設置者がセンサーに不可能なことを求めていることです:壁を透視したり、レンズにほとんど見えない動きを検出したりすることです。ユーザーが死角の角を曲がると、単一の頂点取り付けセンサーでは手遅れになるまで解決できない死角に入ります。コーヒーがこぼれ、すねがカートにぶつかり、照明制御システムが最終的には幾何学的な失敗の責任を負わされます。
「死角」センサーの物理学
L字型の問題を解決するには、モーションセンサーをカメラとして考えるのをやめなければなりません。センサーは人を「見る」のではなく、グリッド上の熱の動きを検出します。PIRセンサーの白いプラスチックドームの中にはフレネルレンズがあり、これは部屋をくさび形の検出ゾーンに分割する多面体の光学プラスチックです。センサーは熱源(人体)がこれらのゾーン間の境界を越えると作動します。
この仕組みは、製品マニュアルにしばしば埋もれている重要な弱点を生み出します:接線方向の動きと放射方向の動きの違いです。
接線方向の動き は動きです これらのゾーンを横切る センサーの視野を横切ります。これは複数の検出くさびを素早く切り抜け、強く明確な信号を生み出します。PIRにとって最良のシナリオです。
放射方向の動きは、しかし、直接的な動きです に向かって または センサーから離れる動きです。 人がセンサーにまっすぐ歩いてくると、基本的に単一のくさび内に長時間留まります。熱のシグネチャーはわずかに大きくなりますが、グリッド上を「動く」ことはありません。センサーはこの接近にほとんど気づきません。
Rayzeekモーションセンサーのポートフォリオからインスピレーションを得る。
欲しいものが見つからない?ご心配なく。あなたの問題を解決する別の方法はいつでもあります。私たちのポートフォリオがお役に立てるかもしれません。
長い廊下では、中央線を歩く人は、遠端に設置されたセンサーに対して放射方向に動いています。センサーがトリガーするのに十分な差分を検知するまでに20フィート歩くかもしれません。さて、L字型を考えてみましょう。角に単一のセンサーを置くと、L字のどちらの脚から近づくユーザーも放射方向、つまりセンサーに直接向かって動いています。彼らはほとんどセンサーの真下に来るまで死角に留まります。
これを解決しようとして、デュアルテクノロジーセンサー(PIRと超音波またはマイクロ波検出の組み合わせ)で部屋をアクティブな波で満たそうとするかもしれません。超音波が微細な動きにより敏感であることは技術的には正しいですが、廊下では新たな問題を引き起こします。超音波は硬い表面で反射し、石膏ボードやガラスを透過します。レトロフィットでは、隣のオフィスで誰かが椅子で動くたびに廊下のライトが点灯したり、閉じたドアのそばを通るたびに点灯したりします。廊下には、レンズの制限を尊重すれば、PIRが安定性の面で優れたツールです。
頂点戦略:ターンに注目する二つの目

L字型の廊下で信頼できるキャリブレーションを保証する唯一の方法は、単一センサーの経済性を放棄することです。頂点に一つの目を置いて両方の通路を効果的に見ることはできません。専門的なアプローチでは、L字の各脚に専用のセンサーを配置し、ターン部分で重なり合う「キルゾーン」を作る必要があります。
交差点の中央に一台を設置する代わりに、角から離して二つのセンサーを配置します:
- センサーA 北側の脚に、ターンから約10〜15フィート離れた位置に設置し、交差点に向かって南を向いています。
- センサーB 東側の脚に設置し、交差点に向かって西を向いています。
正確な距離は天井の高さや特定のRayzeekモデルのカバレッジパターンによりますが、意図は幾何学的です:センサーAが東側の脚を動く人を捕らえることを望みます。 接線方向に (視野を横切って)ターンに到達する前に。
これにより、センサーがお互いの死角を監視するシナリオが生まれます。北側の廊下を歩く人はセンサーAに向かって放射状に動いています(検知は弱い)が、センサーBの視野を接線方向に横切っています(検知は強い)。重要な決定点である角に到達するまでに、両方のセンサーは接線方向の通過を十分に検知しています。ユーザーが方向転換する前にライトが点灯します。
この配置は単なる設置以上の物理的な調整も要求します。センサーが開いたドアから会議室や階段室を見通すような複雑なレイアウトでは、レンズマスキングが必須です。ほとんどの商用センサーには不透明なステッカーやプラスチックの挿入物が付属しています。これらは包装廃棄物ではなく、検知コーンを廊下の壁に合わせて形作り、廊下外の動きを無視するための重要なツールです。
見えない敵:気流と熱

完璧な幾何学的配置であっても、センサーは環境によって無効化されることがあります。業界ではこれを「ゴーストスイッチ」と呼びます。人がいないのに一晩中点滅するライトのことです。ほとんどの場合、センサー自体に故障はありません。単にHVACシステムに負けているだけです。
多分、あなたは興味がある

- Ceiling-mounted PIR occupancy sensor with dry-contact relay output
- 12/24VDC or 12/24VAC low-voltage supply
- COM, NO, and NC isolated relay contacts for EMS, HVAC, and building control inputs

- Low-voltage DC recessed ceiling-mounted microwave motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- 10A max work current with adjustable time delay, Lux threshold, and sensitivity
- Higher-load recessed ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Recessed ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Ceiling-mounted RZ037 PIR occupancy sensor dimmer for 220V power
- 3A maximum working current with 660W rated load
- LUX button controls light-sensor ON/OFF and user-set dimming brightness
- Ceiling-mounted RZ037 PIR occupancy sensor dimmer for 110V power
- 3A maximum working current with 330W rated load
- LUX button controls light-sensor ON/OFF and user-set dimming brightness

- Low-voltage DC ceiling-mounted microwave motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- 10A max work current with adjustable time delay, Lux threshold, and sensitivity
- Higher-load ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Ceiling-mounted microwave motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 5.8 GHz microwave sensing with adjustable time delay, Lux threshold, and sensitivity
- Low-voltage DC recessed ceiling mount PIR motion sensor switch
- 12 VDC / 24 VDC input with 10-30 VDC range
- Max work current 10A with adjustable time delay, Lux threshold, and sensitivity
- Higher-load recessed ceiling mount PIR motion sensor switch
- 100-265 VAC line-voltage input, 10A model
- 360-degree detection with adjustable time delay, Lux threshold, and sensitivity
- Recessed ceiling mount PIR motion sensor switch
- 100-265 VAC line-voltage input, 5A model
- 360-degree detection with adjustable time delay, Lux threshold, and sensitivity
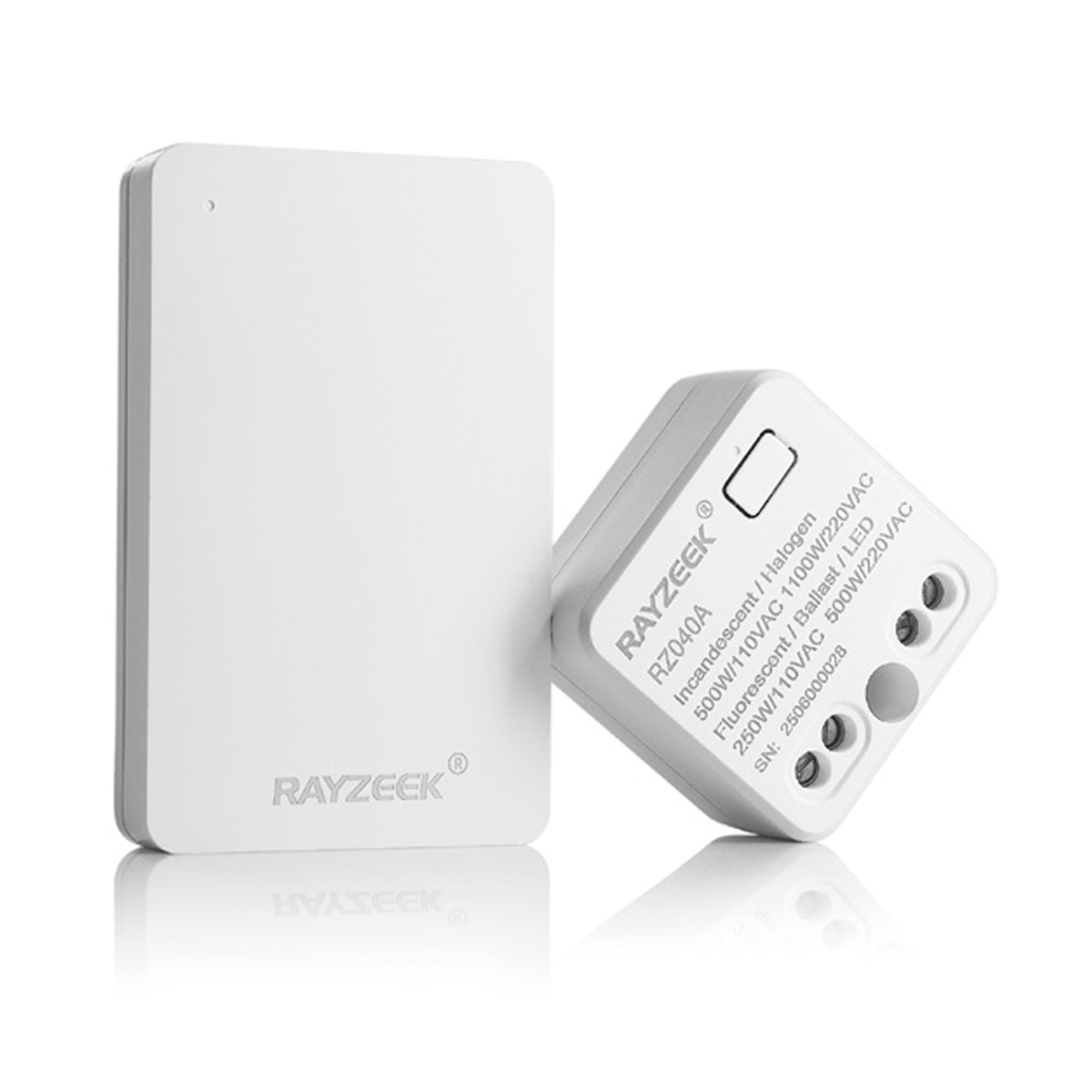
- Wireless switch and receiver kit for indoor ON/OFF lighting control
- 100-230VAC, 50/60Hz receiver with 5A rated current
- CR2032-powered wireless switch with 2.4GHz communication
- 占有(オートオン/オートオフ)
- 12–24V DC(10–30VDC)、最大10A
- 360°カバレッジ、8–12m直径
- 遅延時間 15秒~30分
- 光センサー オフ/15/25/35ルクス
- 高/低感度
- 自動ON/自動OFF占有モード
- 100–265V AC、10A(ニュートラル必要)
- 360°カバレッジ; 検出直径8–12 m
- タイム遅延15秒〜30分; Lux OFF/15/25/35; 感度 高/低
- 自動ON/自動OFF占有モード
- 100–265V AC、5A(中性線必要)
- 360°カバレッジ; 検出直径8–12 m
- タイム遅延15秒〜30分; Lux OFF/15/25/35; 感度 高/低

- 100V-230VAC
- 送信距離:最大20m
- ワイヤレスモーションセンサー
- 配線制御

- 電圧:単4電池2本 / 5V DC (Micro USB)
- デイ/ナイト・モード
- 遅延時間15分、30分、1時間(デフォルト)、2時間

- EUプラグ電源アダプタ

- イギリスのプラグ電源アダプタ
PIRセンサーは熱の差を検出します。冬の朝の暖房サイクル中に天井の供給ベントから突然熱風が吹き出すと、PIR素子にはまるで人がいるかのように見えます。センサーが供給ディフューザーから4~6フィート以内に設置されている場合、乱流と温度の急上昇が誤検知を引き起こします。これは特に、非占有時の温度設定が厳しい商業オフィスパークでよく見られ、システムが起動すると強烈な空調の吹き出しが発生します。
レイアウト上センサーがベントの近くに設置される場合、感度ダイヤルを下げるのは解決策ではありません。HVACを無視するために感度を下げると、静かに歩く人を検知できないほど鈍感になってしまいます。解決策は物理的なものです。センサーを移動するか、気流に面したレンズセグメントをしっかりとマスクしてください。レンズの内側に電気テープを貼ることで、センサーはベントを見えなくしつつ、床面の動きには敏感なままにできます。
配線と調整の論理
L字ターンのための二つのセンサー戦略を実装する際、設置者は通常配線構成について尋ねます。二つのセンサーで同じ負荷を制御できますか?標準的な商業用PIRユニット(Rayzeek RZ021シリーズなど)では、並列配線であれば可能です。
並列構成では、センサーは共通のラインと負荷を共有する独立したスイッチとして機能します。もし どちらか センサーがリレーを閉じ(動きを検知し)、回路が完成するとライトが点灯します。ライトが消えるのは 両方 センサーが空室を検知し、それぞれのタイムディレイが終了したときだけです。これが完全なカバレッジに必要な「OR」論理です。
重要な警告: 両方のセンサーが同じ分岐回路のフェーズから給電されていることを確認してください。共有ジョンクションボックス内でフェーズを交差させることはコード違反であり、安全上の危険です。リレーが同時に閉じると直接短絡が発生します。
配線が完了すると、苦情を防ぐためにタイムディレイを15分または30分に設定したくなりますが、これは甘えです。廊下のセンサーで30分のタイムアウトを設定すると、カバレッジの不備を隠し、センサーが再トリガーを見逃しても誰も気づかない程度にライトを点灯し続けます。廊下のような一時的な空間では、適切に配置されたセンサーシステムは5分のタイムアウトで確実にライトを保持すべきです。人がまだいるのに5分でライトが消えるなら、タイマーを延長せずにセンサーの位置や向きを修正してください。
感度設定については、おおよそ75-80%のままにしてください。感度を最大にするのは初心者のミスで、電気ノイズや遠くの熱源からの干渉を招きます。単一のセンサーを100%の感度で微妙に動作させるよりも、二つのセンサー配置による強い接線信号に頼る方がはるかに良いです。
モーションアクティベート省エネソリューションをお探しですか?
PIRモーションセンサ、モーションアクティベート省エネ製品、モーションセンサスイッチ、Occupancy/Vacancy商用ソリューションについては、弊社までお問い合わせください。
ウォークテスト
配線ナットをねじっただけで仕事は終わりではありません。最終ステップは検証のためのウォークテストであり、敵対的でなければなりません。廊下の中央を腕を振りながら歩かないでください。「忍び足」の経路を歩き、壁に沿い、ゆっくり動き、何も持たずにください。できるだけ死角の角度からコーナーに近づいてください。
もしL字交差点の角を曲がり、ライトが点灯する前に暗闇の中に2歩進めるなら、システムは失敗しています。ライトは必ず点灯しなければなりません 前に 体は頂点で回転します。もし回転しない場合は、センサーの角度を調整するか、マスクの開口部を広げてください。目標はシームレスな引き継ぎであり、ユーザーがセンサーやスイッチ、暗闇のことを一切意識せず、ただ前方の道だけを考えることです。







